



















4. Cabling Method HRView Function Manual
4-2
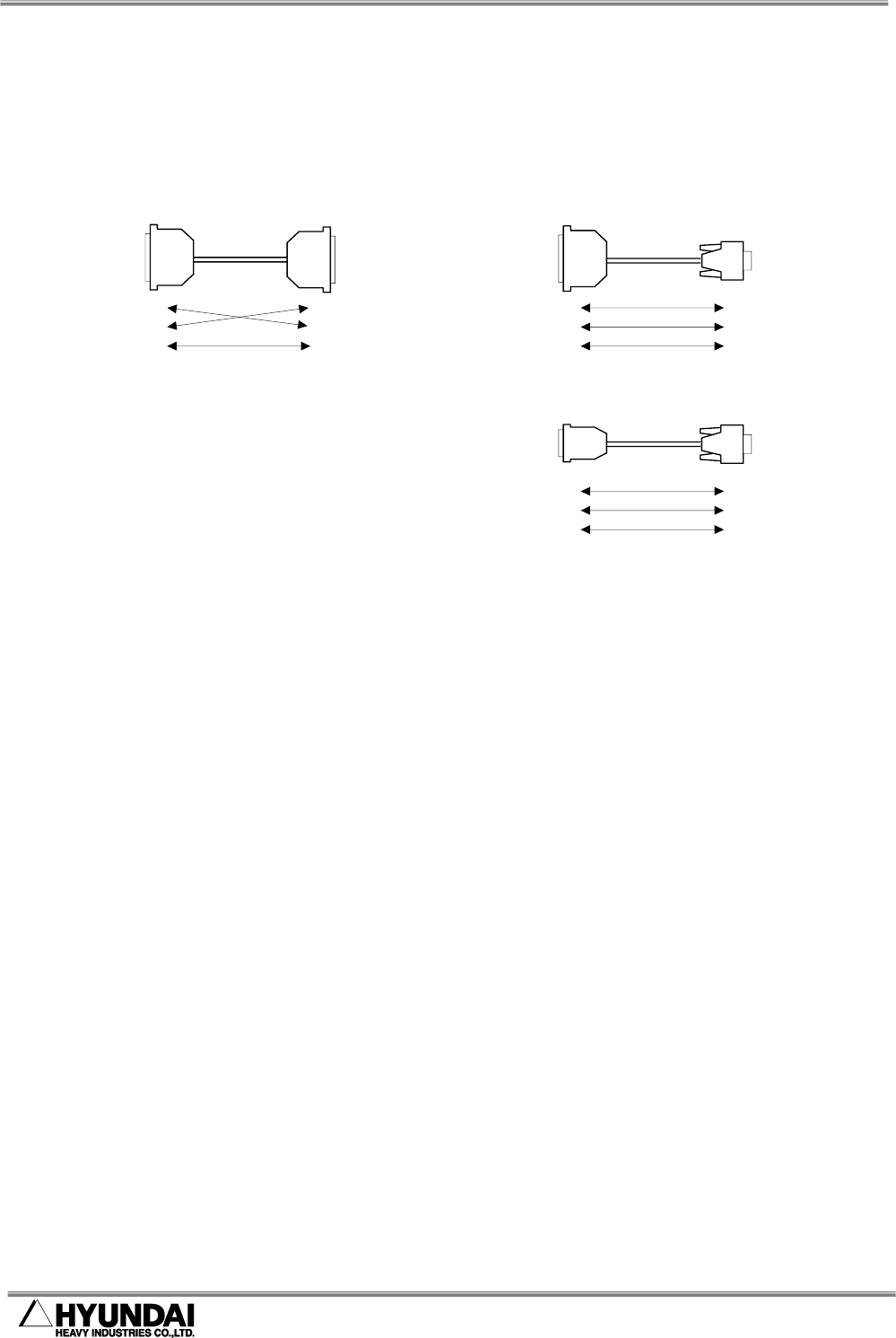
(1) RS-232C Cable
RS-232C cable connection is as follows.
PC
Serial port
Hi3, Hi3TB, Hi4
Controller
serial port#1
25pin - 25pin
RS-232C Cable
M
F
PC
Serial port
25pin - 9pin
RS-232C Cable
M
F
2 2
3 3
7 7
Tx Tx
Rx Rx
GND GND
2 2
3 3
7 5
Tx Rx
Rx Tx
GND GND
PC
Serial port
9pin - 9pin
RS-232C Cable
M
F
2 2
3 3
5 5
Tx Rx
Rx Tx
GND GND
Hi3, Hi3TB, Hi4
Controller
serial port#1
Hi3, Hi3TB, Hi4
Controller mainboard
CNSIO port
Fig 4.1 Cabling method
Connect connectors at the both ends of the cable to available PC serial port and to
serial port #1 of controller cabinet, respectively.
(2) Ethernet TP (Twisted Pair) cable
If the controller should be connected to the hub, use the cable that TX-RX is not
twisted. If the controller should be connected directly to a PC, use the cable that
TX-RX is twisted.