



















Chapter 4 Controller Synthesis
MATRIXx Xmath Robust Control Module 4-10 ni.com
Suppose the input/output weights are as follows:
2. Create the four weights:
Wdist = 1/makepoly([1,1],"s")
Wdist (a transfer function) =
1
-----
s + 1
Wnoise = 0.1;
Wreg=1/makepoly(1,"s");
Wact = 0.1;
3. Combine the weights in W
in
and W
out
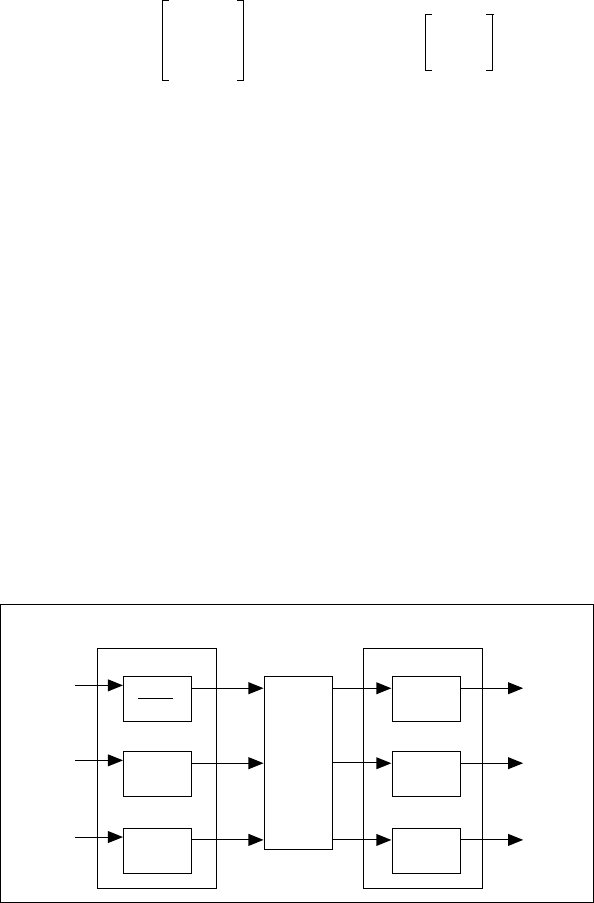
(refer to Figure 4-4):
Win = [Wdist,0,0;0,Wnoise,0;0,0,1];
Wout=[Wreg,0,0;0,Wact,0;0,0,1];
The resulting system, P can be obtained by putting in series the plant
G and the two weights:
P = Wout*G*Win;
Before using the hinfcontr( ) function, you must decide on an
initial guess for
gamma.
Figure 4-4. Plant and Weights for hinfcontr( )
W
out
10
00.1
=
W
in
1
s 1+
-----------
0
00.1
=
u
d
y
1
s + 1
W
in
1
W
out
n
u
y
0.1 0.1
u
u
y
1 1
G