



















Chapter 4 Controller Synthesis
© National Instruments Corporation 4-23 MATRIXx Xmath Robust Control Module
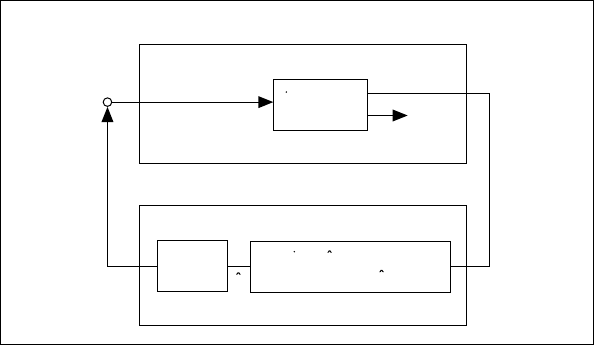
Figure 4-8. LQG Feedback System for Loop Transfer Recovery
lqgltr( )
[SysC,EV,Kr] = lqgltr(Sys,Wx,Wy,K,rho,{keywords})
The lqgltr( ) function designs an estimator or regulator which recovers
loop transfer robustness through the design parameter ρ (
rho). For a
discussion of the syntax and a full listing of keywords, refer to the Xmath
Help.
The keyword
recover specifies whether the recovery should be achieved
through regulator or estimator design.
If the keyword is set to
recover="regulator", the loop-transfer is
recovered by designing a regulator with the following model:
and the objective function:
with:
x = Ax + Bu
y = Cx
x
y
G(s)
K(s)
Plant
Estimator
x
x = Ax + Bu
+
K
E
ε
ε = y – Cx
K
R
u
x
·
Ax w+=
yCxv+=
J
1
2
---
x'Qx u'Ru+()td
0
∞
∫
=
QR
xx
ρC'C+=
RR
uu
=