



















Chapter 4 Controller Synthesis
MATRIXx Xmath Robust Control Module 4-20 ni.com
System is continuous
fs_evr (a column vector) =
-0.645263 + 0.587929 j
-0.645263 - 0.587929 j
-0.347592 + 1.09155 j
-0.347592 - 1.09155 j
8. Calculate the frequency-shaped estimator:
Sysaf=system(ar,br,cr,0);qwwa=qxx;qvva=quu;
[Sysfs_se,fs_eve]=fsesti(Sysaf,2,qwwa,qvva)
Sysfs_se (a state space system) =
A
0 1
-1 -1.00005
B
5.52357e-17 0
0.99005 1
C
1 0
0 1
D
0 0
0 0
X0
0
0
System is continuous
fs_eve (a column vector) =
-0.500025 + 0.866011 j
-0.500025 - 0.866011 j
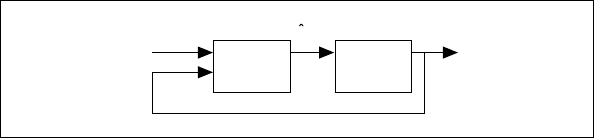
The compensator should be structured as shown in Figure 4-7.
Figure 4-7. Frequency-Shaped Compensator
The fslqgcomp( ) function can be used to develop the compensator.
y
x
A
u
Sysfs_se Sysfs_se