



















2-261
2 Instructions
CP1E CPU Unit Instructions Reference Manual(W483)
Data Control Instructions
2
PIDAT
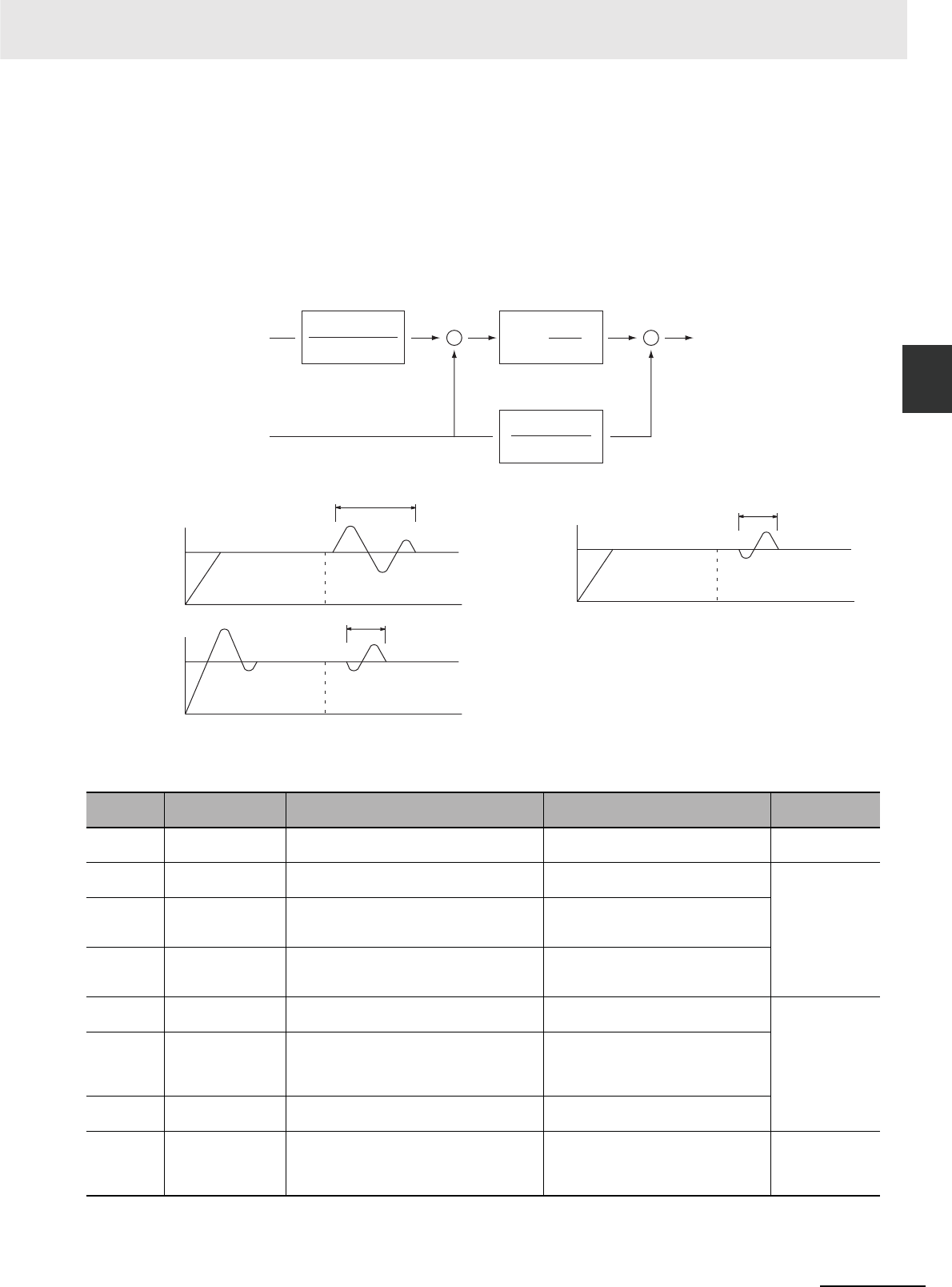
Block Diagram for Target Value PID with Two Degrees of Freedom
When overshooting is prevented with simple PID control, stabilization of disturbances is slowed (1). If
stabilization of disturbances is speeded up, on the other hand, overshooting occurs and response
toward the target value is slowed (2).
When target-value PID control with two degrees of freedom is used, on the other hand, there is no
overshooting, and response toward the target value and stabilization of disturbances can both be
speeded up (3).
PID Parameter Settings
Control data Item Contents Setting range
Change with ON
input condition
C Set value (SV) The target value of the process being controlled. Binary data (of the same number of bits as
specified for the input range)
Allowed
C+1 Proportional band The parameter for P action expressing the pro-
portional control range/total control range.
0001 to 270F hex (1 to 9999);
(0.1% to 999.9%, in units of 0.1%)
Can be changed
with input condi-
tion ON if bit 1 of
C+5 is 1.
C+2 Tik
Integral Constant
A constant expressing the strength of the integral
action. As this value increases, the integral
strength decreases.
0001 to 1FFF hex (1 to 8191);
(9999 = Integral operation not executed)
(See note 1.)
C+3 Tdk
Derivative Constant
A constant expressing the strength of the deriva-
tive action. As this value increases, the derivative
strength decreases.
0001 to 1FFF hex (1 to 8191);
(0000 = Derivative operation not executed)
(See note 1.)
C+4 Sampling period (τ) Sets the period for executing the PID action. 0001 to 270F hex (1 to 9999);
(0.01 to 99.99 s, in units of 10 ms)
Not allowed
Bits 04 to 15
of C+5
2-PID parameter (α) The input filter coefficient. Normally use 0.65 (i.e.,
a setting of 000). The filter efficiency decreases
as the coefficient approaches 0.
000 hex: α = 0.65
Setting from 100 to 163 hex means that the
value of the rightmost two digits is set from
α= 0.00 to α= 0.99. (See note 2.)
Bit 03 of C+5 Manipulated variable
output designation
Designates the manipulated variable output for
when the PV equals the SV.
0: Output 0%
1: Output 50%
Bit 01 of C+5 PID constant change
enable setting
The timing of enabling changes made to the pro-
portional band (P), integral constant (Tik), and
derivative constant (Tdk) for use in PID calcula-
tions.
0: At start of PID instruction execution
1: At start of PID instruction execution
and each sampling period
Allowed
1 + (1 – λ) Ti · s
1 + Ti · s
+
–
+
–
Kp +
Kp
Ti · s
Kp Td/s
1 + λ · Td · s
(1)
(2)
(3)
Disturbance response
Simple PID Control
Feed-forward PID Control
As the target response is slowed,
the disturbance response worsens.
As the disturbance response is
slowed, the target response worsens.
Overshoot
Target response
SV
PV
Kp:Proportional constant
Ti:Integral time
Td:Derivative time
s:Laplace operator
α:2-PID parameter
λ:Incomplete derivative coefficient
Measured
v
alue (PV)
Set value
(target value)
Target value filter Proportional + integral elements
Preceding
derivative-type elements
Manipulated variable