



















2 Instructions
2-328
CP1E CPU Unit Instructions Reference Manual(W483)
Independent Mode Positioning
Note Pulse output will stop immediately if the CPU Unit is changed to PROGRAM mode.
Opera-
tion
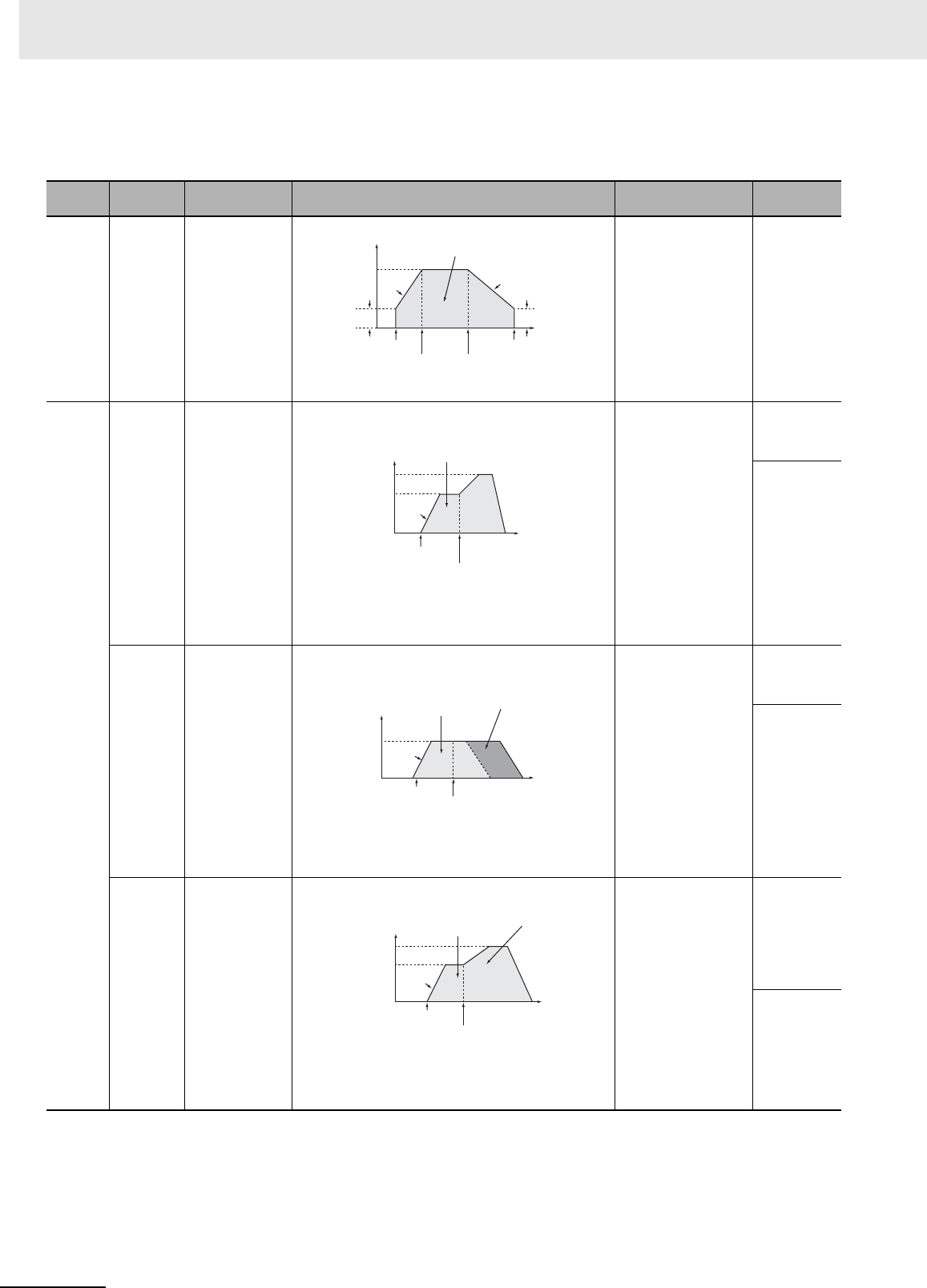
Purpose Application Frequency changes Description
Procedure/
instruction
Starting
pulse out-
put
Complex
trapezoidal
control
Positioning with
trapezoidal accel-
eration and decel-
eration (Separate
rates used for
acceleration and
deceleration; start-
ing speed)
The number of
pulses can be
changed during
positioning.
Accelerates and deceler-
ates at a fixed rates. The
pulse output is stopped
when the specified num-
ber of pulses has been
output. (See note.)
Note The target position
(specified number
of pulses) can be
changed during
positioning.
PLS2(887)
Chang-
ing set-
tings
To change
speed
smoothly
(with
unequal
accelera-
tion and
decelera-
tion rates)
Changing the tar-
get speed (fre-
quency) during
positioning
(different accelera-
tion and decelera-
tion rates)
PLS2(887) can be exe-
cuted during positioning
to change the accelera-
tion rate, deceleration
rate, and target fre-
quency.
Note To prevent the tar-
get position from
being changed
intentionally, the
original target posi-
tion must be speci-
fied in absolute
coordinates.
PLS2(887)
↓
PLS2(887)
PULS(886)
↓
ACC(888)
(Independent)
↓
PLS2(887)
To change
target posi-
tion
Changing the tar-
get position during
positioning (multi-
ple start function)
PLS2(887) can be exe-
cuted during positioning
to change the target
position (number of
pulses), acceleration
rate, deceleration rate,
and target frequency.
Note If a constant speed
cannot be main-
tained after chang-
ing the settings, an
error will occur and
the original opera-
tion will continue to
the original target
position.
PLS2(887)
↓
PLS2(887)
PULS(886)
↓
ACC(888)
(Independent)
↓
PLS2(887)
To change
target posi-
tion and
speed
smoothly
Changing the tar-
get position and
target speed (fre-
quency) during
positioning (multi-
ple start function)
PLS2(887) can be exe-
cuted during positioning
to change the target
position (number of
pulses), acceleration
rate, deceleration rate,
and target frequency.
Note If a constant speed
cannot be main-
tained after chang-
ing the settings, an
error will occur and
the original opera-
tion will continue to
the original target
position.
PULS(886)
↓
ACC(888)
(Independent)
↓
PLS2(887)
PLS2(887)
↓
PLS2(887)
Pulse frequency
Target
frequency
Starting
frequency
Specified number
of pulses
Deceleration
rate
Execution of
PLS2(887)
Target
frequency
reached.
Deceleration point
Output stops.
Stop
frequency
Time
Accel-
eration
rate
Pulse
frequency
Changed target
frequency
Target frequency
Specified number of
pulses (Specified with
PULS(886).)
Acceleration/
deceleration
rate
Execution of
ACC(888)
(independent
mode)
PLS2(887) executed to change
the target frequency and
acceleration/deceleration rates.
(The original target position is
specified again.)
Time
Execution of
PLS2(887)
PLS2(887) executed to
change the target position.
(The target frequency and
acceleration/deceleration
rates are not changed.)
Pulse
frequency
Target
frequency
Acceleration/
deceleration
rate
Specified
number of
pulses
Number of pulses
changed with
PLS2(887).
Time
Pulse
frequency
Target frequency
Acceleration/
deceleration
rate
Number of
pulses specified
with PLS2(887).
Execution of
PLS2(887)
PLS2(887) executed to
change the target frequency,
acceleration rate and
deceleration rate.
Time
Number of pulses
changed with
PLS2(887).
Changed target
frequency