



















169
[Reference]
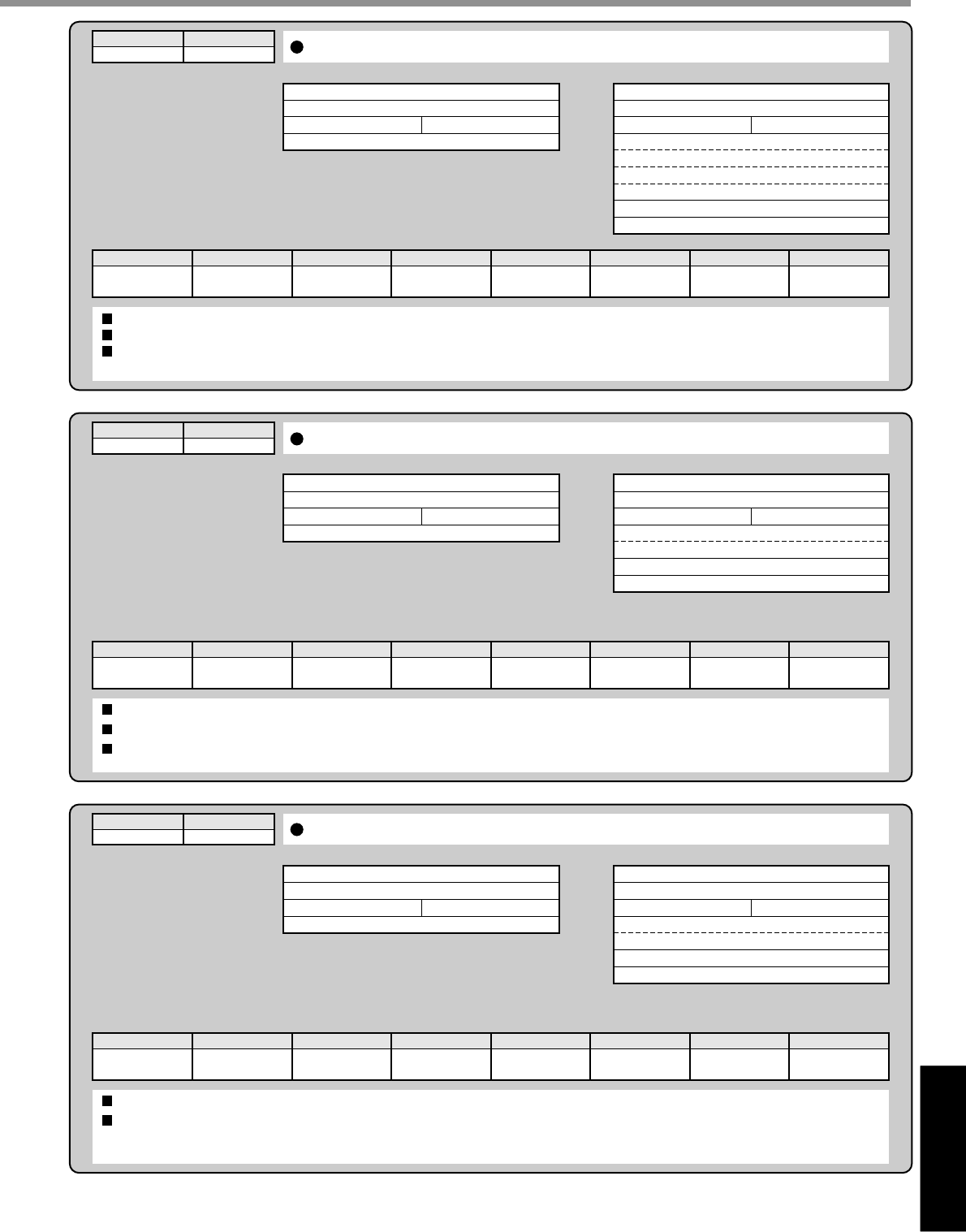
Reference
command
2
mode
4
Readout of current speed
Received data
0
axis
checksum
24
Error code
Transmitted data
This command is used to read current speed (unit [r/min]).
An output value is 16 bits.
For the counter value, "-" indicates CW and "+" indicates CCW.
bit7
0 : Normal
1 : Error
6543210
3
axis
Data (current speed) L
H
Error code
checksum
24
command
2
mode
5
Readout of current torque output
Received data
0
axis
checksum
25
Error code
Transmitted data
This command is used to read current torque output (unit: to be converted as rated torque = 2000).
An output value is 16 bits.
bit7
0 : Normal
1 : Error
6543210
3
axis
Data (torque) L
H
Error code
checksum
25
command
2
mode
2
Readout of the feedback pulse counter
Received data
0
axis
checksum
22
Error code
Transmitted data
A current position of the feedback pulse counter is expressed by absolute coordinates from the start-up time.
For the counter value, "-" indicates CW and "+" indicates CCW.
The feedback pulse counter indicates a cumulative sum of pulses of the position detector, which corresponds to a position of
the motor that really moves.
bit7
0 : Normal
1 : Error
65
Command error
4
Command error
Command error
3210
5
axis
Counter value L
H
Error code
checksum
22