



















PROGRAMMING: GETTING STARTED PROGRAMMING: GETTING STARTED
5049
Exercise 3: Modifying the Program so that the
WonderBorg can Pick Up and Follow an Infrared Signal
In this exercise, we’re going to modify the program from Exercise 2, so that if the
robot detects an infrared signal, it will enter "Following mode (Panel 2)", and start
following the infrared signal. This program uses 2 panels.
Program for Exercise 3
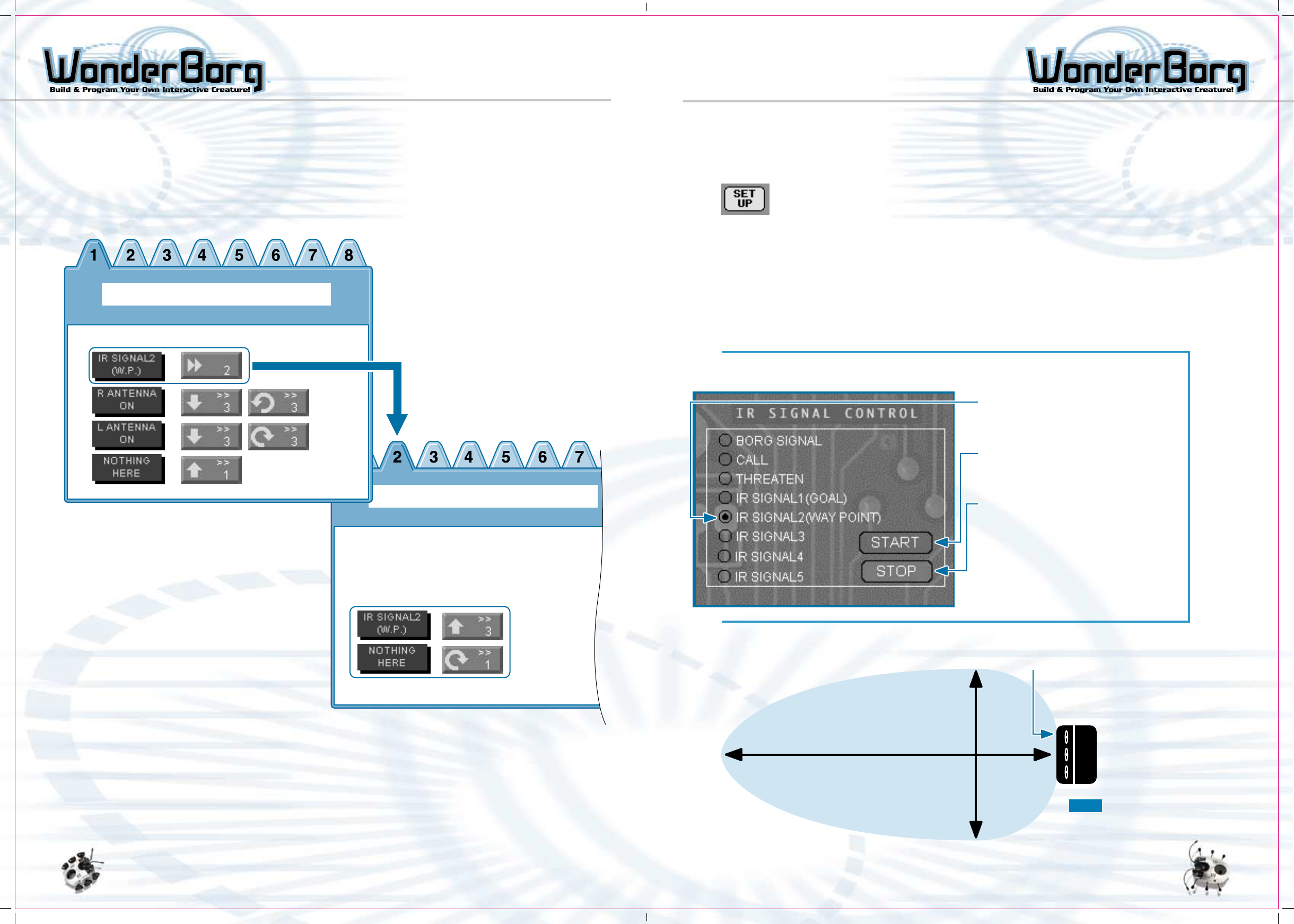
Panel 1
Panel 1 was created by taking the program from Exercise 2 and augmenting it with a
line telling the robot what to do if it detects infrared signal 2 (Way Point). If it
detects this particular infrared signal, it is instructed to switch to the program on
Panel 2. As a result of the tests you carried out in Exercise 2, your blocks for evasive
action may look different from those shown above, but you do not need to alter the
figures all over again.
Panel 2
Panel 2 contains a program for "Following mode", where the robot will follow infrared
signal 2 (Way Point). If it detects this particular infrared signal, it is instructed
to move forward 3 steps. If there is no sensor reaction, it must then turn one step
to the right. In this program, if the robot loses the infrared signal, it will turn
round and round, while if it finds it, it will move forward.
Panel 1
Panel 2
Add this Section to the program from Exercise 2.
Create a new panel: Panel 2
You can simply copy the blocks
from Panel 1 to Panel 2, and then
edit them.
Testing
Before sending the program to the robot and having it executed we are going to prepare
to transmit infrared signal 2 (Guide to another robot) from the interface.
Click the "Set Up" button at the bottom right of the Panel screen, select
"infrared signal 2 (Way Point)" from "IR Signal Control" menu on the
Set UP screen, then click the "Start" button. The red indicator lamp on
the Interface should flash for a short while, then the flashing will
stop, and this pattern should be repeated continuously. If this happens,
the infrared signal 2 is being transmitted from the interface.
If necessary, you can unplug the cable from the Interface, and place
the Interface some distance away from your PC. When you do this, do not
switch the Interface’s main switch OFF: the infrared signal will stop
if you do so.
The range of the infrared signal is shown in the diagram below. Place
the robot somewhere inside this range before starting the transmission.
If the transmission does not work, move the robot a little closer to
the Interface, then try again.
How to Transmit an Infrared Signal
1. Select the desired Signal by
clicking the name.
2. When you click the "Start" button,
the infrared signal will be transmitted
to the robot.
3. To stop the transmission of the
infrared signal, either click the
"Stop" button, or start transmitting
another signal. The transmission
will also stop automatically if
you click "Download to WonderBorg"
on the Settings screen, if you
transmit a program by clicking
"Download to WonderBorg" on the
Panel screen.
The Ranged Reached by the Infrared Signal
Interface (front face)
max 1.5m
max 0.75m
Range reached by signal
Note: The range may vary
depending on the
brightness of the
surroundings, and other
factors.