



















A-4 Application Notes
601626-B
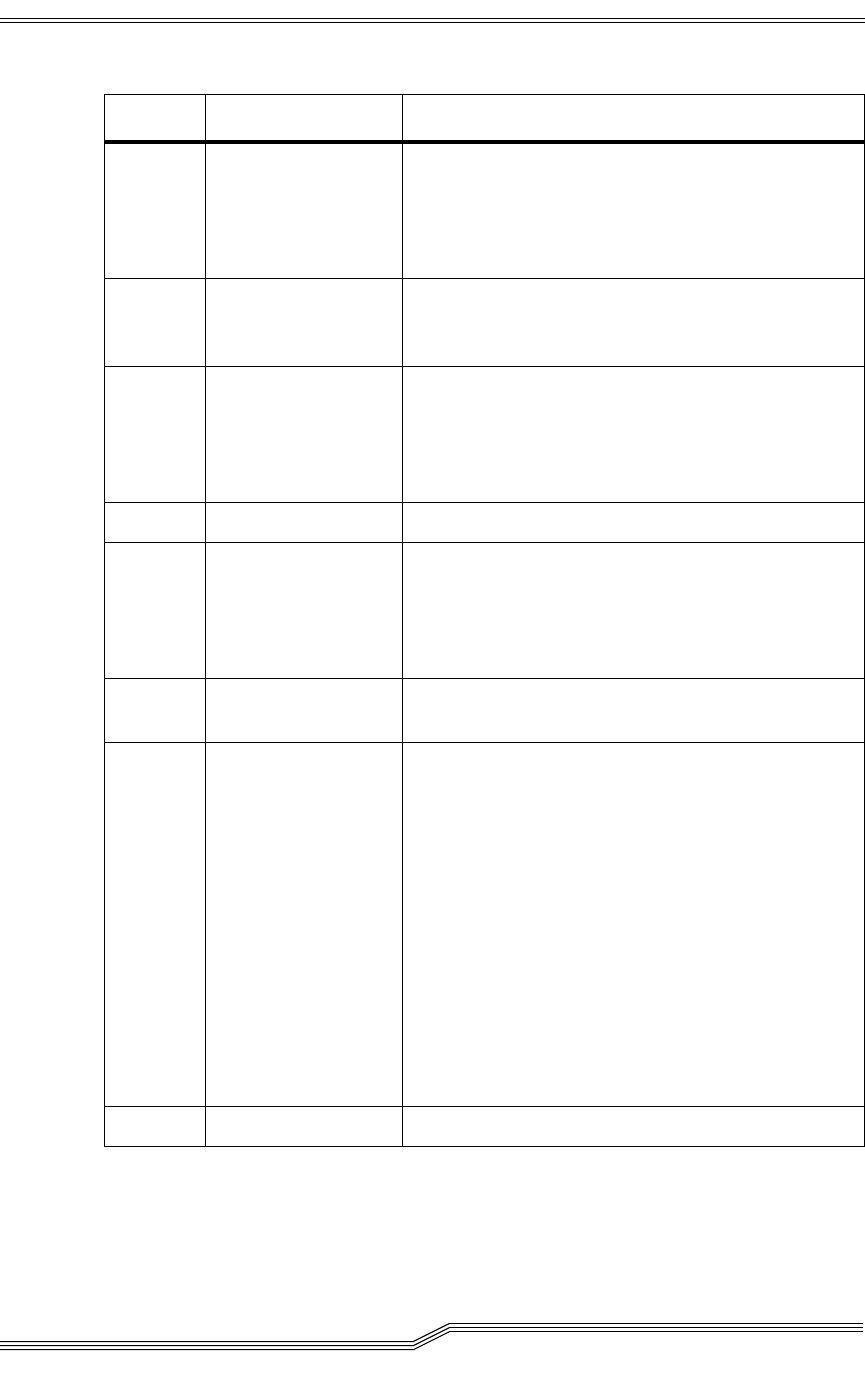
6 EPROBVOL The AMS returned a error code from robot
control or information about an unrecoverable
situation in the AML. Stop the command that
returned this error. Refer to the AMU-Log for
more information.
7 EAMU The AMS returned an unexpected error.
Stop the command that returned this error.
Refer to the AMU-Log for more information.
8 EAMUCOMM An internal error was detected in the AMS
software (AMS error code 1001 in the AMU-log),
wait a moment, then enter this, or another test
command again. Otherwise, the AMS software
will need to be stopped and restarted.
9EROBOT not used
10 EROBOTCOMM There is a problem in the communication
between AMU and robot control or the robot is
switched logically, or physically to not ready.
Check the status with aci_robstat and, if possible,
set the status to ready. Try the command again.
11 ENODAS On ACI Version 1.2 mapped to the Error
EDASINT (Refer to EDASINT on page A-7).
12 EDEVEMPTY AMS returned the error code 1094, the drive
named is in the AMU database with the attribute
Empty. If there is a cartridge in the drive
(previous error with database mismatch or
manual intervention), the AMU database must be
updated. Use the AMS screen or remote SQL-
commands to set the drive coordinate:
• Volser: volser in the drive
• Attribute: ’O’ (Occupied)
• set the home coordinate of the Volser
• Attribute: ’M’ (Mounted)
• if the drive is an Optical Disk drive the second
site of the OD must also be set.
• Attribute ’R’ (Reverse side Mounted)
13 ENOTREG not used
Table A-1 Error Code Reactions
Number d_error Name Recommended Reactions to the Error Code