



















6-18 Command Language
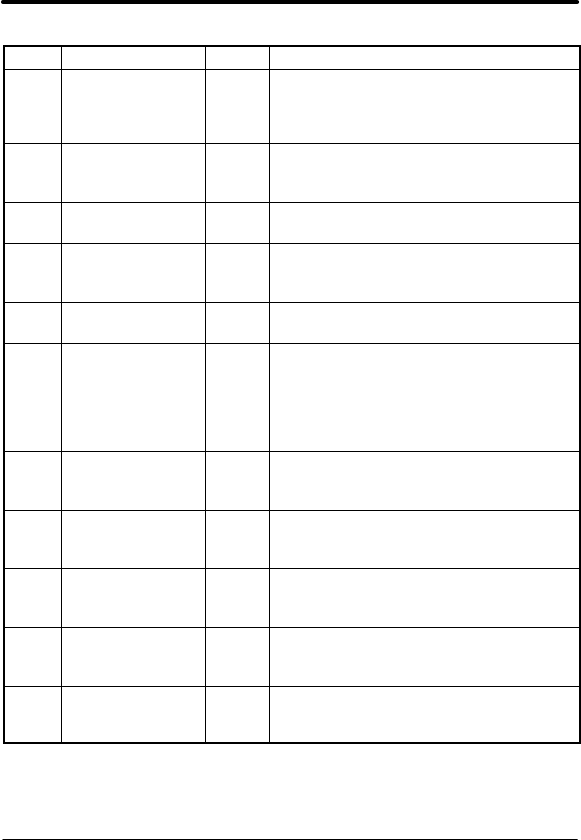
Table 6-2 Command Mode Table
Value Mode Class Description
0 None ALL No mode selected. Output stage of
control remains off or disabled (voltage
and current removed from the motor),
regardless of RunCmd condition.
1 Torque CMD
selected source
S,V Closes the current loop with command
input from the source selected in the
COMMAND SELECT parameter.
2 Torque CMD
Network
S,V Closes the current loop with command
input from the TorqueRef register.
3 Speed CMD
selected source
All Closes the velocity loop with command
input from the source selected in the
COMMAND SELECT parameter.
4 Speed CMD
Network
All Closes the velocity loop with command
input from the SpeedRef register.
5 Orient S,V C or Index channel orient. The motor will
be commanded in the Fwd direction at
the predefined homing speed until the
index pulse is detected. The motor will
then be commanded to hold position at
the predefined home offset.
6 Position CMD
ABS
S,V Closes the position loop with an absolute
position command from the PositionRef
register.
7 Position CMD
INC
S,V Closes the position loop with an
incremental position command from the
PositionRef register.
9 Position CMD
External
S,V Closes the position loop with command
input from external option source (such
as pulse follower EXB card.)
11 Process Torque All Closes the torque process control loop.
Commands come from the appropriate
command input parameters.
12 Process Velocity All Closes the velocity process control loop.
Commands come from the appropriate
command input parameters.