



















HX200/HX200L-2000/HX300/HX300L/HX400
6-20
6.5.4. Encoder Calibration(Data input) and Selection
IT is necessary to compensate encoder data for the basic position of each
axis.
Refer to 『Encoder calibration』in the Controller Manual for details.
Select 『Encoder calibration (Position Rec)』in the mode of Constant.
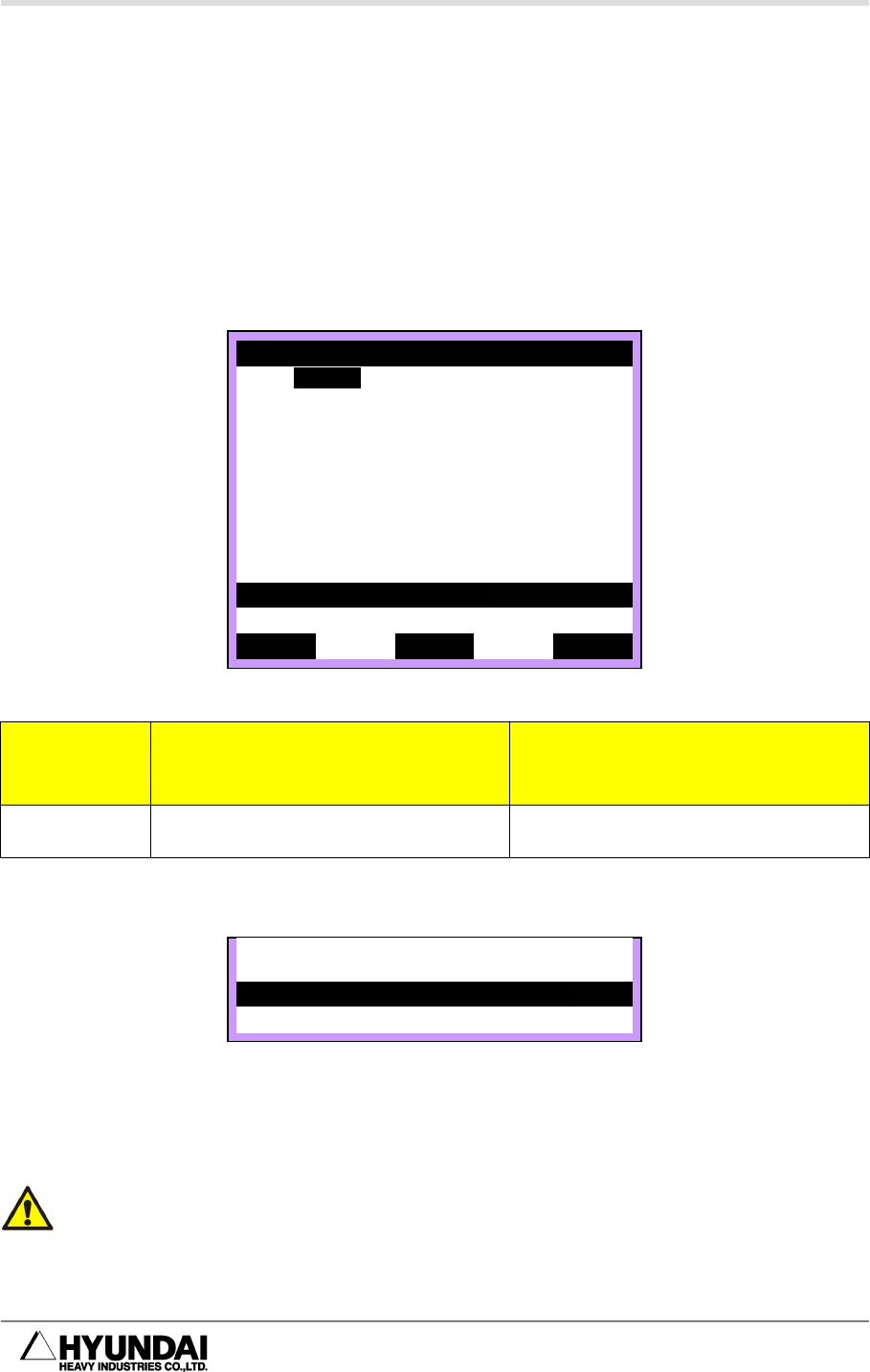
[Encoder Calibration Screen]
Table 6-6 Data range after resetting
Axis Data range after resetting
Number of pulses
per an encoder revolution
All of Axes
0 ~8191 8192
(1) Press [SET] key after moving the revolving bar into the desired location to set
by using [↓][↑] keys, and the following message is displayed.
(2) Move the robot to the position that the origin pin becomes [ON] with axis
operating button, and press [REC] key.
(3) Press 『[PF5]: Complete』to complete setting.
Warning
In case of encoder DATA compensation after replacing motor, check if the motor
power is on with the power 『ON』.
08:09:05 *** Encoder offset *** A:0 S:3
Use Arrow key and press [SET].
>
All Comp
Complete
S =[00400000] S =[00400000] [ 0.0]
H =[00400000] H =[00400000] [ 90.0]
V =[00400000] V =[00400000] [ 0.0]
R2=[00400000] R2=[00400000] [ 0.0]
After axis Oper, press [REC].[ESC]usable
>