



















1. Safety
1-17
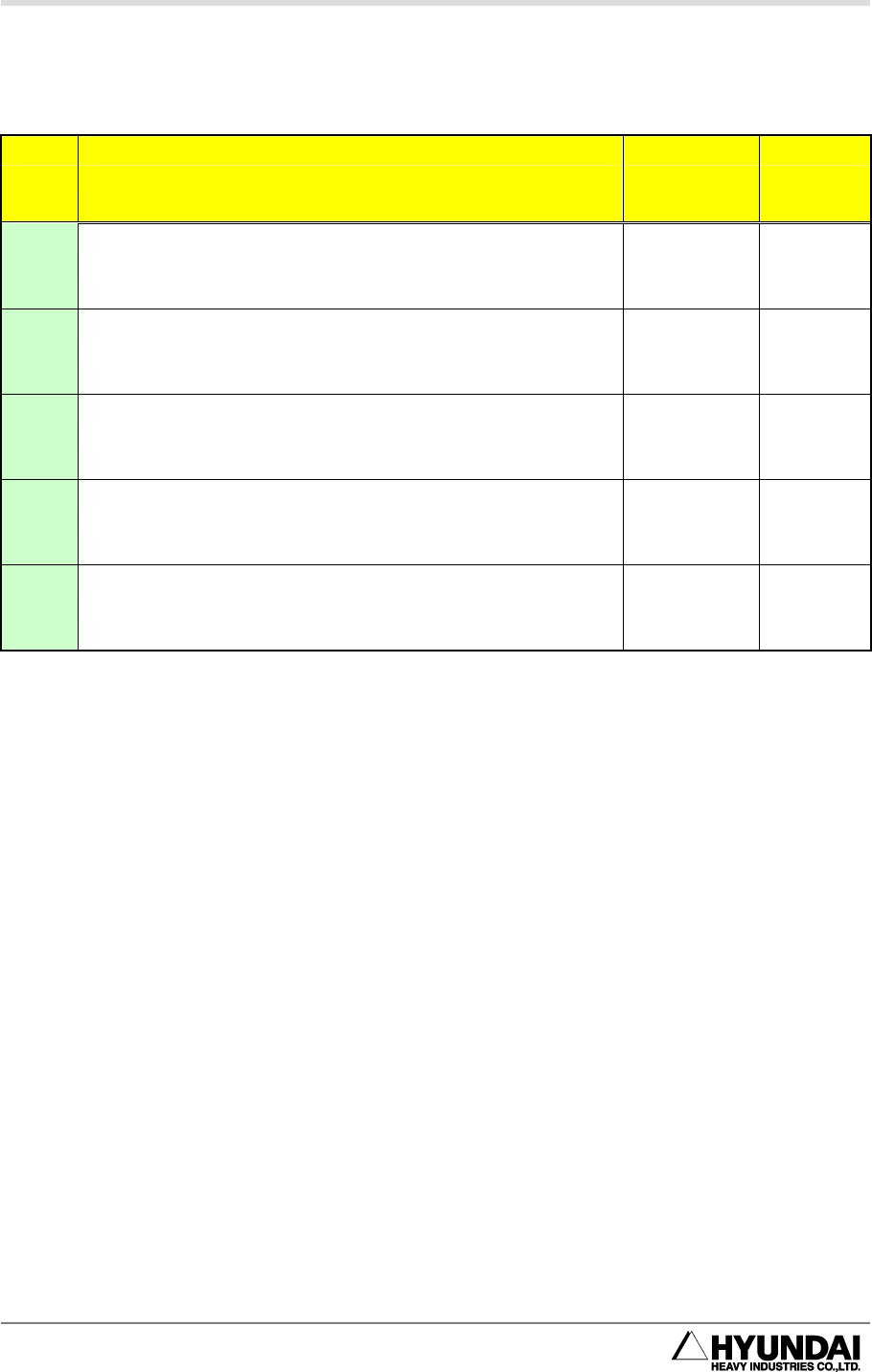
Table 1-2 State of robot stop
No. State of Robot Drive Power
Access
1
Pause
(Minor failure, Pause switch)
ON X
2
Emergency stop
(Major failure, Emergency stop switch, Safety gate)
OFF O
3
Input signal standby of peripheral equipment
(START INTERLOCK)
ON X
4 Playback Completion ON X
5 Standby ON X
Even in the accessible state of robot, be watchful against any possible
sudden movement of robot. Make sure to avoid approaching the robot
without precautions for emergency under all circumstances.
Though the access during a pause is shown in the table as『×』, allow
the access to robot with the same precautions as teaching work if the
entrance is open to take actions for minor failures(i.e. malfunction
caused by failure in arc, nozzle contact and weldment detection).
(17) Clean up any split oil, tools, and impurities in the safety fence after
completing robotic operation. Accidents such as conduction may occur in the
working envelope contaminated by oil, or scattered tools on its floor. Make a
habit of organizing and cleaning things up.