



















1
Outline
1-1
1. Features
CC-Link is the abbreviation of Control & Communication Link.
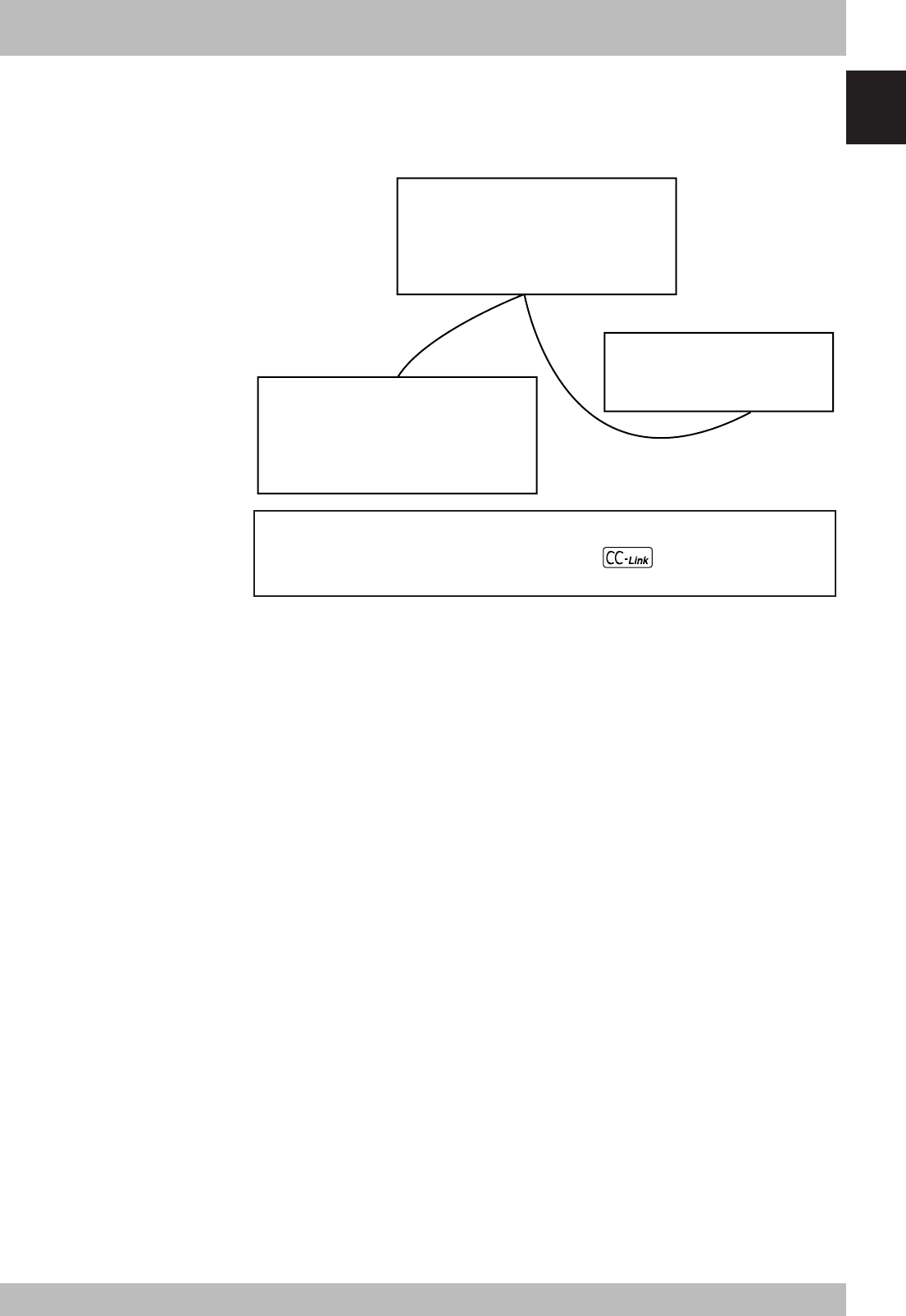
The CC-Link system connects the robot controller and dispersed input/output modules
with dedicated cables, and controls these modules from the master station PLC.
The CC-Link system allows wiring to be reduced.
Master station
Station that controls entire CC-
Link system.
The PLC master module
corresponds to this.
Remote device station
Station controlled by master station
in CC-Link system.
The robot controller corresponds to
this.
Remote I/O station
Station controlled by master
station in CC-Link system.
CC-Link is a registered trademark of CC-Link partner association.
The CC-Link compatible module provided with a label is compatible with
CC-Link Ver 1.10.
[Wiring saving]
One dedicated cable (4-wire) is used to connect the robot controller and PLC. This allows
the entire system wiring to be reduced.
[Emulated serialization on parallel DIO]
By making the robot controller’s internal settings without using a robot program, the
various I/O devices, such as the sensors and relays mounted on the robot controller’s
parallel I/O can be controlled from the PLC as if they were CC-Link system I/O devices.
c
CAUTION
An emergency stop terminal for
hardwire is provided in the SAFETY
connector on the robot controller.
When the CC-Link system is used
while STD. DIO is not used (external
DC 24V power supply is not used),
invalidate the external DC 24V
monitor control setting in SYSTEM >
PARAM mode. If it is left valid, the
STD. DIO interlock signal is made
valid causing an error in the robot
operation commands.
n
NOTE
The dedicated input of the STD.DIO
connector provided on the controller
will be disabled except for an interlock
signal (DI 11). When the external 24V
monitor control of system parameters
is disabled, the interlock signal (DI 11)
will also be disabled.