



















5-4
Specifications
5
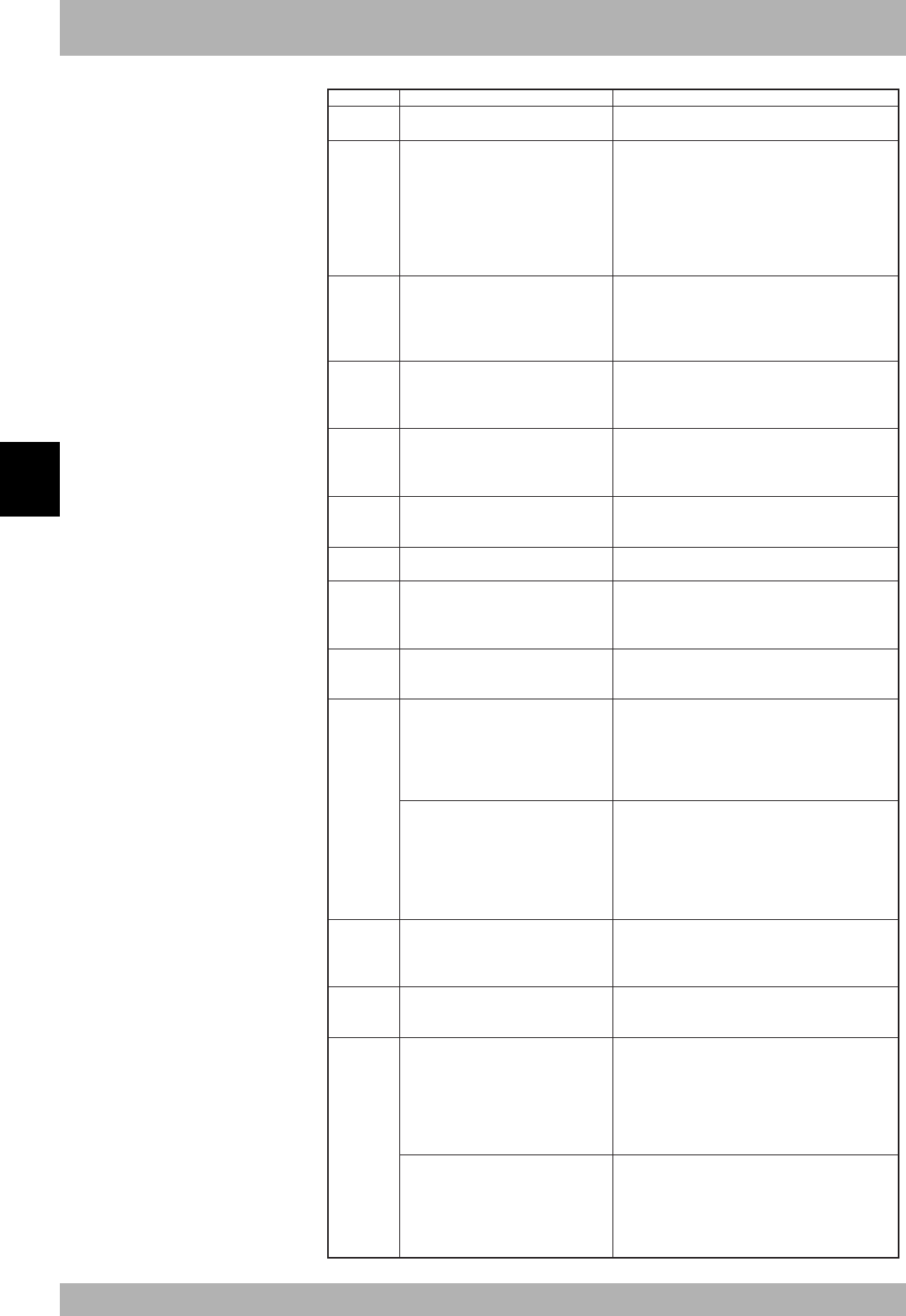
2. Details of remote input/output signals
SI (00): Emergency stop input
SI (01): Servo ON input
SI (02): Service mode input
SI (03): Step run
SI (05):
IO command execution trigger input
SI (10): Sequence control input
SI (11): Interlock input
SI (12): Robot program start input
SI (13): AUTO mode input
[RCX141/221]
SI (14): Absolute reset input
[RCX142/222]
SI (14): Origin return
SI (15): Program reset input
SI (16): MANUAL mode input
[RCX141/221]
SI (17): Origin return
[RCX142/222]
SI (17): Absolute reset input
RYn0
RYn1
RYn2
RYn3
RYn5
RYn8
RYn9
RYnA
RYnB
RYnC
RYnD
RYnE
RYnF
Device No. Signal name Details
Turn OFF to trigger emergency stop on controller.
Keep turned ON during normal operation.
Turn ON to cancel emergency stop and turn ON the
robot servo motor.
Servo-ON is executed when this input is switched
from OFF to ON.
Emergency stop input [SI(00)] (RYn0) must be ON
and emergency stop conditions in the robot
controller (emergency stop terminal of SAFETY
connector, etc.) must be canceled.
Turn OFF to enter the controller in service mode. Keep
turned ON during normal operation.
(Effective only when SAFE mode is enabled.)
(In SAFE mode enabled, dedicated input might be
disabled depending on service mode parameter setting.)
Turn ON to execute a step in the program during
AUTO mode.
One line of the program is executed when this input
is changed from OFF to ON.
Changes from OFF to ON while executing the IO
command.
Turns ON after the IO command is set to a general-
purpose input.
Turn ON to execute sequence program in the robot
controller.
Sequence program is executed when this input is ON.
Turn OFF to stop execution of robot program.
Keep tuned ON to continue program execution.
Turn ON to execute robot program.
Robot program is executed when this input is
switched from OFF to ON.
Robot controller must be in AUTO mode.
Turn ON to select AUTO mode.
Robot program enters AUTO mode when this input
is switched from OFF to ON.
Turn ON to perform absolute reset on robot.
Reset is performed when this input is changed from
OFF to ON. Absolute reset is not performed on axes
that use mark method for origin return.
Robot controller must be in MANUAL mode to
perform absolute reset.
Turn ON to perform origin return on incremental
axes.
When this input is changed from OFF to ON, origin
return is performed on axes that are set to "sensor"
or "stroke end" origin return method. Origin return is
not performed on axes that are set to "mark" origin
return method.
Turn ON to reset robot program.
Program reset is executed when this input is
switched from OFF to ON.
Robot controller must be in AUTO mode.
Turn ON to select MANUAL mode.
Robot program enters MANUAL mode when this
input is switched from OFF to ON.
Turn ON to perform origin return on incremental
axes.
When this input is changed from OFF to ON, origin
return is performed on axes that are set to "sensor"
or "stroke end" origin return method. Origin return is
not performed on axes that are set to "mark" origin
return method.
Turn ON to perform absolute reset on robot.
Reset is performed when this input is changed from
OFF to ON. Absolute reset is not performed on axes
that use mark method for origin return.
Robot controller must be in MANUAL mode to
perform absolute reset.
n: Address assigned to master module with station No. setting