



















3-4
Communication
3
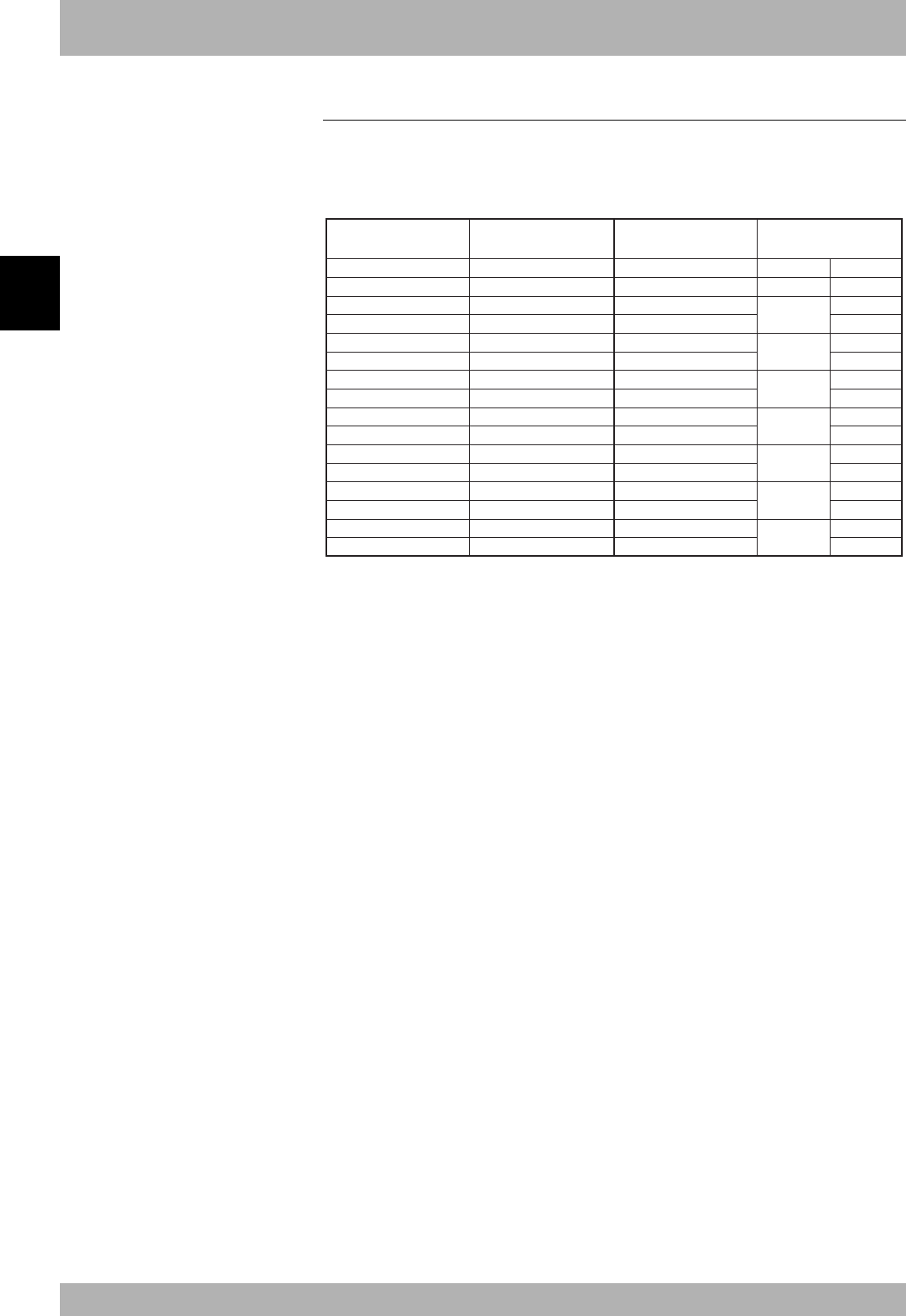
3.2 Transmitting data
Data is transmitted by writing the robot controller output port data into the master station
PLC’s input device.
The correspondence of the master station PLC’s input device numbers and robot controller’s
output port numbers is shown below.
n: Address assigned to master module with station No. setting
RXn7~RXn0 SO(07)~SO(00) RWrn SOW(0)
RXnF~RXn8 SO(17)~SO(10) RWr(n+1) SOW(1)
RX(n+1)7~RX(n+1)0 SO(27)~SO(20) RWr(n+2) SOD(2) SOW(2)
RX(n+1)F~RX(n+1)8 SO(37)~SO(30) RWr(n+3) SOW(3)
RX(n+2)7~RX(n+2)0 SO(47)~SO(40) RWr(n+4) SOD(4) SOW(4)
RX(n+2)F~RX(n+2)8 SO(57)~SO(50) RWr(n+5) SOW(5)
RX(n+3)7~RX(n+3)0 SO(67)~SO(60) RWr(n+6) SOD(6) SOW(6)
RX(n+3)F~RX(n+3)8 SO(77)~SO(70) RWr(n+7) SOW(7)
RX(n+4)7~RX(n+4)0 SO(107)~SO(100) RWr(n+8) SOD(8) SOW(8)
RX(n+4)F~RX(n+4)8 SO(117)~SO(110) RWr(n+9) SOW(9)
RX(n+5)7~RX(n+5)0 SO(127)~SO(120) RWr(n+10) SOD(10) SOW(10)
RX(n+5)F~RX(n+5)8 SO(137)~SO(130) RWr(n+11) SOW(11)
RX(n+6)7~RX(n+6)0 SO(147)~SO(140) RWr(n+12) SOD(12) SOW(12)
RX(n+6)F~RX(n+6)8 SO(157)~SO(150) RWr(n+13) SOW(13)
RWr(n+14) SOD(14) SOW(14)
RWr(n+15) SOW(15)
Master station
input device No.
Robot controller
output port No.
Master station
input device No.
Robot controller
output port No.
To write the robot controller’s bit information into the master station PLC’s input device
No., write the following commands in the robot program in the same manner as the DO
output port:
SET/RESET command
Assignment statement
OUT command
Example : To turn RX(n+1)0 ON
SET SO(20) or SO(20) =1....* SO(20) will turn ON.
Example : To write variable A data into RX(n+1)0 to RX(n+1)7
SO2() = A .............................* The variable A data will be converted into
a binary and substituted into SO2().
If variable A is 127, 7Fh will be set in
SO2().
When writing the robot controller’s word information into the master station PLC’s input
device No., write the following command in the robot program.
Assignment statement
Example : To write 512 into RWr (n+2) as word data
SOW (2) = 512 .....................* 512 is substituted in SOW (2), and SOW
(2) becomes 0200h.
Example : To write 69905 as the double word data for RWr (n+2) and RWr (n+3)
SOD (2) = 69905 ..................* 69905 is substituted in SOD (2), SOW (2)
becomes 1111h and SOW (3) becomes
0001h.
n
NOTE
The SO statement in the robot language
can be defined from SO2 ( ) to SO27 ( ),
but the CC-Link compatible module
accepts from SO2 ( ) to SO15 ( ).
3. Communication with master station PLC
n
NOTE
Word data written with SOW(n) is a little
endian format with no sign.
Double word data written with SOD(n)
is a little endian format with a sign.
c
CAUTION
SIW(0) and SIW(1) are viewed as
dedicated input ports.