



















5-3
5
Specifications
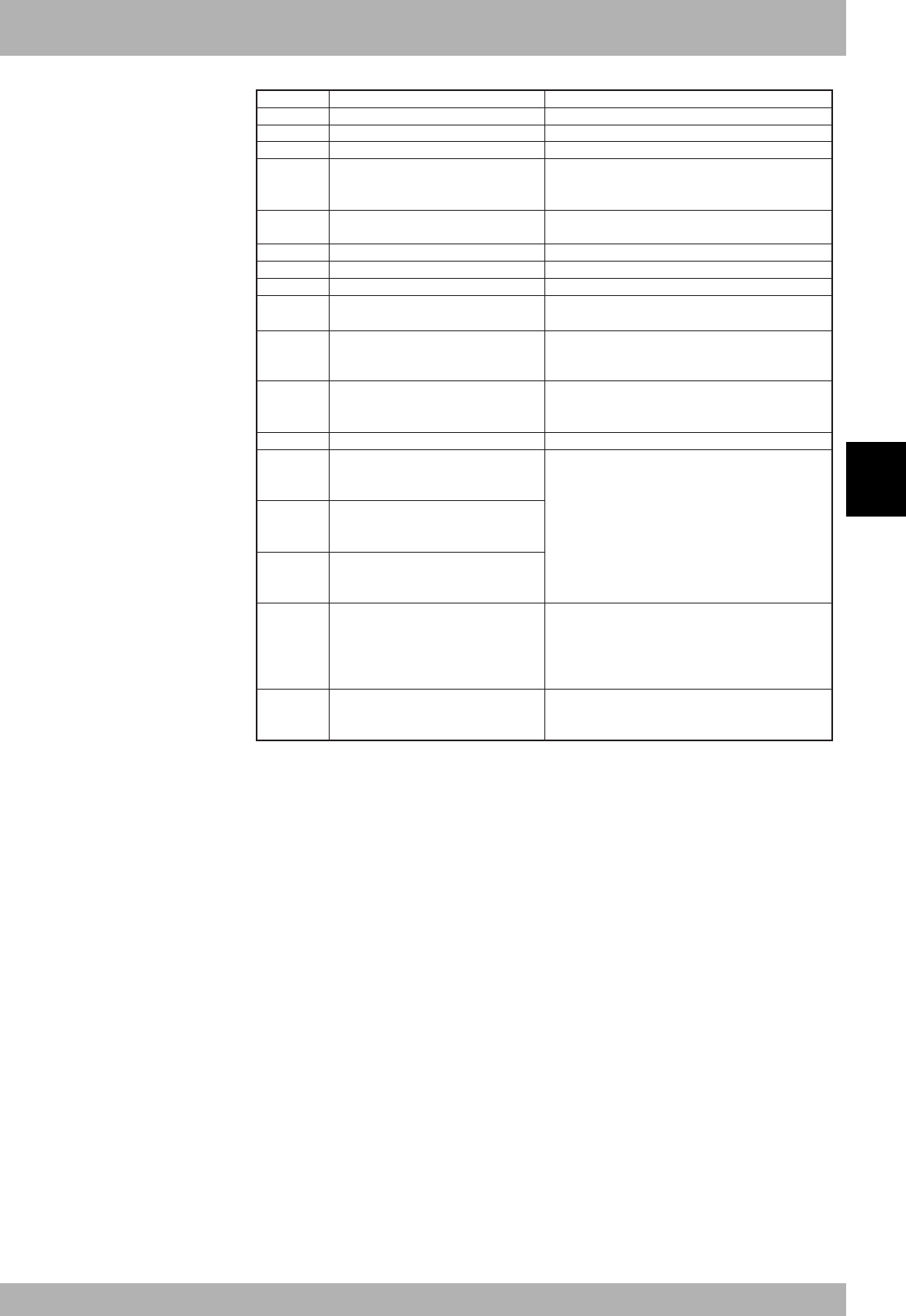
2. Details of remote input/output signals
SO (00):
Emergency stop input status output
SO (01): CPU_OK status output
SO (02): Servo ON status output
SO (03): Alarm status output
SO (10): AUTO mode status output
SO (11):
Origin return complete status output
SO (12):
Sequence program execution status output
SO (13):
Robot program execution status output
SO (14): Program reset status output
SO (15): Battery alarm output
SO (16):
IO command execution judgment output
SO (17):
Output during IO command execution
SO(20) to SO(27):
General-purpose output
to
SO(150) to SO(157):
General-purpose output
Initial data process request flag
Remote station ready
RXn0
RXn1
RXn2
RXn3
RXn8
RXn9
RXnA
RXnB
RXnC
RXnD
RXnE
RXnF
RX(n+1)0
to
RX(n+1)7
to
RX(n+6)8
to
RX(n+6)F
RX(n+7)8
RX(n+7)B
Device No. Signal name Details
Turns ON when robot controller is in emergency stop state.
Turns ON when robot controller is in normal state.
Turns ON when robot controller motor power is ON.
Turns ON when robot controller is in following state:
• Serious error occurred in robot controller.
• Emergency stop input OFF
Turns ON when selected mode is AUTO mode.
Turns OFF when other mode is selected.
Turns ON when robot has complete origin return.
Turns ON while sequence program is executed.
Turns ON while robot program is executed.
Turns ON when robot program has been reset.
Turns OFF when robot program starts.
Turns ON when the system backup battery (all
models of RCX series) or absolute battery
(RCX142/222) is low.
Turns OFF while executing the IO command.
After executing the IO command turns ON if
normal, and stays OFF if abnormal.
Turns ON while the IO command is being executed.
General-purpose output turns ON/OFF when value
is substituted to SO port, or SET/RESET command
is executed or OUT command is executed.
The initial data process request flag turns ON to request
the initial data setting when the power is turned ON, or
when returning from a communication error.
Turns OFF when initial data process is completed
(initial data process complete flag RY(n+7)8 turns ON).
Turns ON when initial data setting is completed and
READY state is entered when power is turned ON
or when returning from communication error.
n: Address assigned to master module with station No. setting