



















HARSFEN0602
MS
Value
Description
0 The position reference generator is idle. Moreover, the Motor position stabilized
within the target radius for long enough time.
1 The position reference generator is idle, or the motor is off (MO=0).
2 The position reference generator is active in one of the optional motion profilers –
PTP, Jog, PT, or PVT.
Table 12-4: Motion status indications
When MS is 1 or less, it is possible to switch the parameters of the external reference
generator.
The condition MS=0 is stronger – it implies that the motor position is indeed stabilized.
The motor position is considered stable if the motor position is within the target radius, for
the target time at least. The target radius is given by TR[1] counts, and the target time is TR[2]
msec.
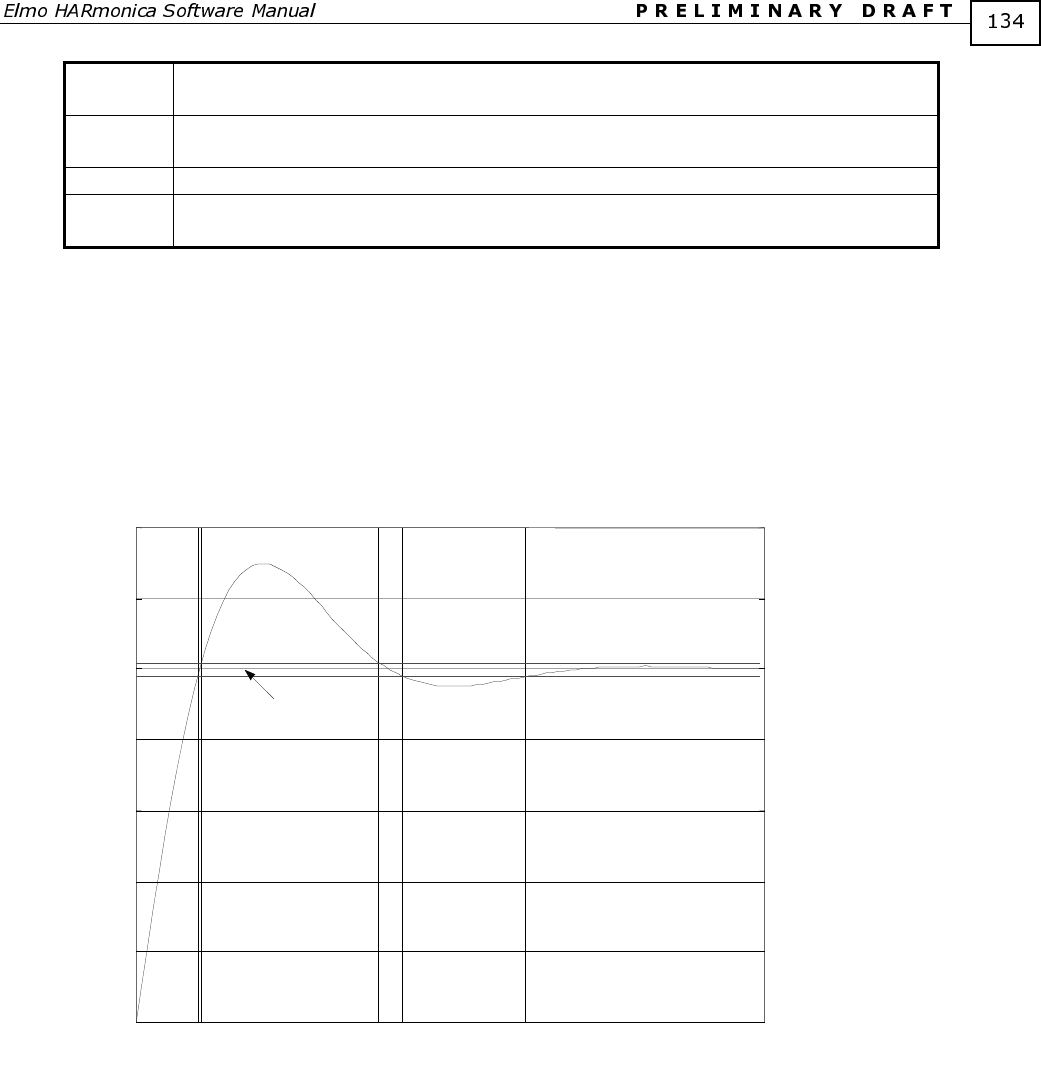
Example
The target time and the target radius concepts are demonstrated in the drawing below.
0.011
9
0.012
4
0.046
2
0.050
6
0.074
4
0
200
400
600
800
1000
1200
1400
Target
radius
Time
(sec)
In this drawing we see an overshooting settling of the motor position on a target at 1000
counts. The target radius is 20. The motor position is within target radius is the range of
[980-1020] counts.
For the dynamics of the example, it is reasonable to select the target time TR[2]=30. If
TR[2] is selected too low, false "On Target" decisions may result. For example, if the target
time is set as 3msec, a final stabilization will be concluded at the time of 0.049 sec, since
during the time interval [0.046, 0.049] the motor was within the allowed position error [980-
1020] counts.
12.1.4 Point-To-Point (PTP)
12.1.4.1 Basic Point-To-Point
In this motion mode the motor will move from its present position to a final point. The final
point is arrived in zero speed and the motor stays there.
The trajectory to the final point is calculated based on the speed, acceleration, and
deceleration limits, as set by the AC, DC, and SP parameters respectively.