



















HARSFEN0602
0: Motion is to stop if the read pointer
reaches MP[2]
MP[3]
1: Motion is to continue when the read
pointer reaches MP[2]. The next row of
the table is MP[1].
Cyclical behavior definition.
MP[4] The number of controller sampling times
in each PT motion segment.
Table 12-10 – PT Motion Parameters
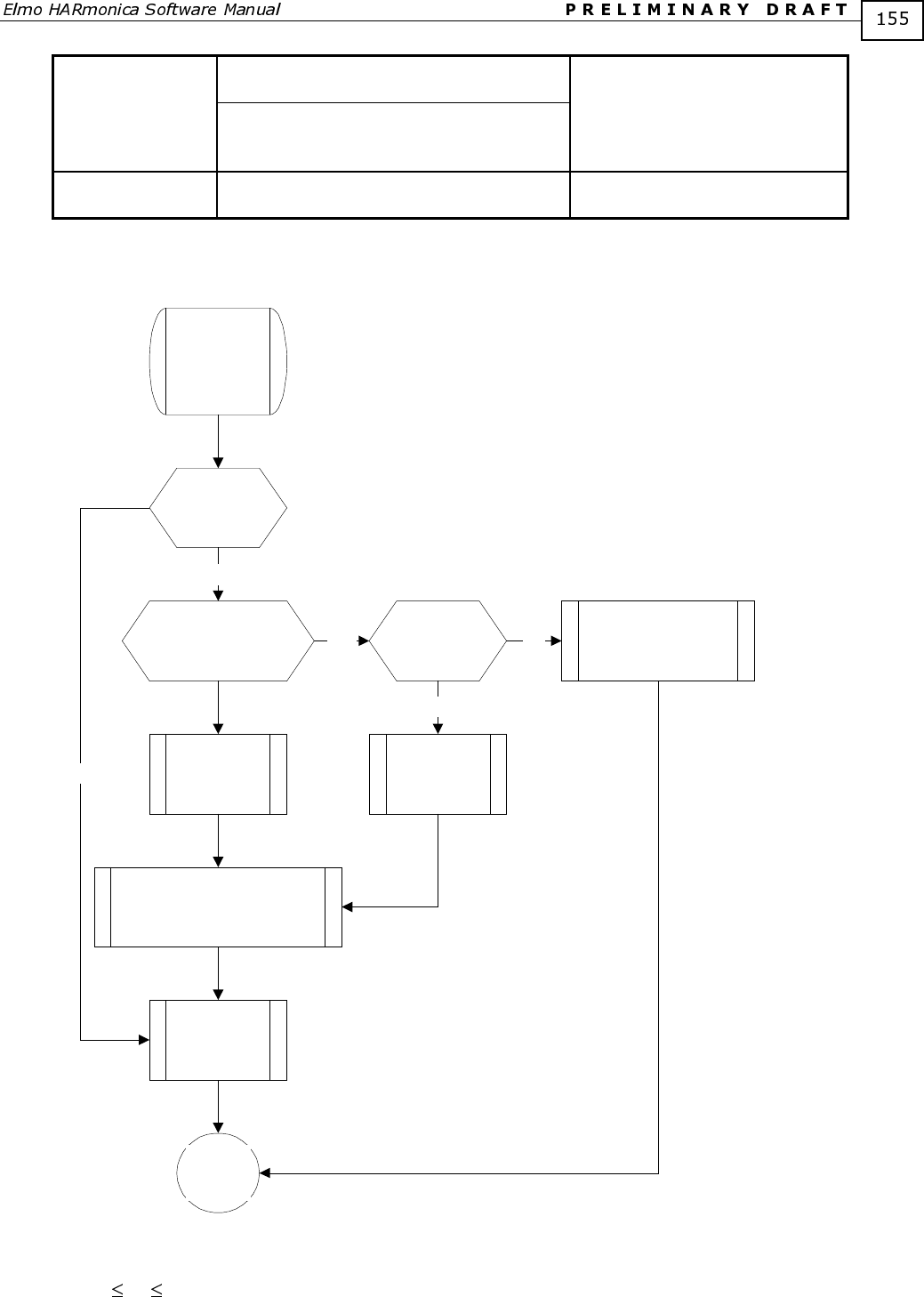
The flow chart of the basic PT mode is depicted below.
Motion
segment
completed
?
N >= MP[2]-1
Increment
read pointer
Read the N+1 element of the
PQ vector and calculate the
parameters of the next motion
segment
Initial
conditions:
PT read
pointer equals
N
Interpolate
position
command
Go to
position
controller
MP[3]==1
Exit PT mode:
Set Stop motion,
using the SD
deceleration
Set the read
pointer to
MP[1]
Yes No
Yes
Yes
No
Figure 28 – PT Decisions Flow Chart
A PT motion starts by stating
PT=N with
1024N1 , and BG.
The command PT=N sets the read pointer of the QP vector to N.