



















42 MDrivePlus CANopen R020507
Statusword (6041
h
) of Homing Mode
9 14 13 12 11 10 9 0
See 1.4 Homing Error Homing Attained See 1.4 Target Reached See 1.4
MSB LSB
Bit Name Value Description
10 Target Reached
0 Halt=0: Home position not reached
Halt=1: Axis decelerating
1 Halt=0: Home position reached
Halt=1: Axis velocity is 0
12 Homing Attained
0 Homing Mode not yet complete
1 Homing Mode carried out successfully
13 Following Error
0 No homing error
1 Homing error
Table 7.2: Homing Mode Bits of Statusword
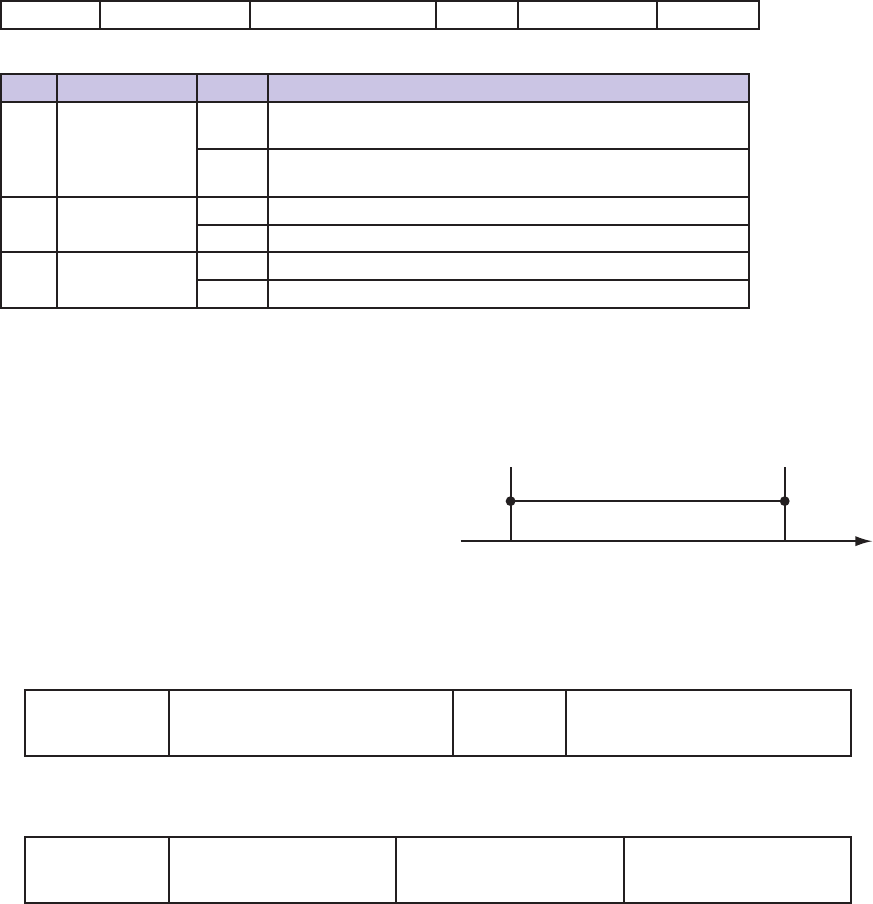
Homing Offset (607Ch)
This object shall indicate the conFigure d difference between
the zero position for the application and the machine home
position (found during homing). During homing the machine
home position is found and once the homing is completed
the zero position is offset from the home position by adding
the home offset to the home position. All subsequent absolute
moves shall be taken relative to this new zero position. This is
illustrated in Figure 7.2. If this object is not implemented then
the home offset shall be regarded as zero. The value of this
object shall be given in micro steps. Negative values shall indicate the opposite direction.
Object Description
Index
607C
h
Name
Homing Offset
Object Code
VAR
Data Type
Integer 32
Entry Description
Access
rw
PDO Mapping
Possible
Range
Integer 32
Default
0
d
0
HOME
OFFSET (Steps)
Figure 7.2: Home Offset