



















51Part 2: DSP-402 Implementation
Section 9
Profile Velocity Mode
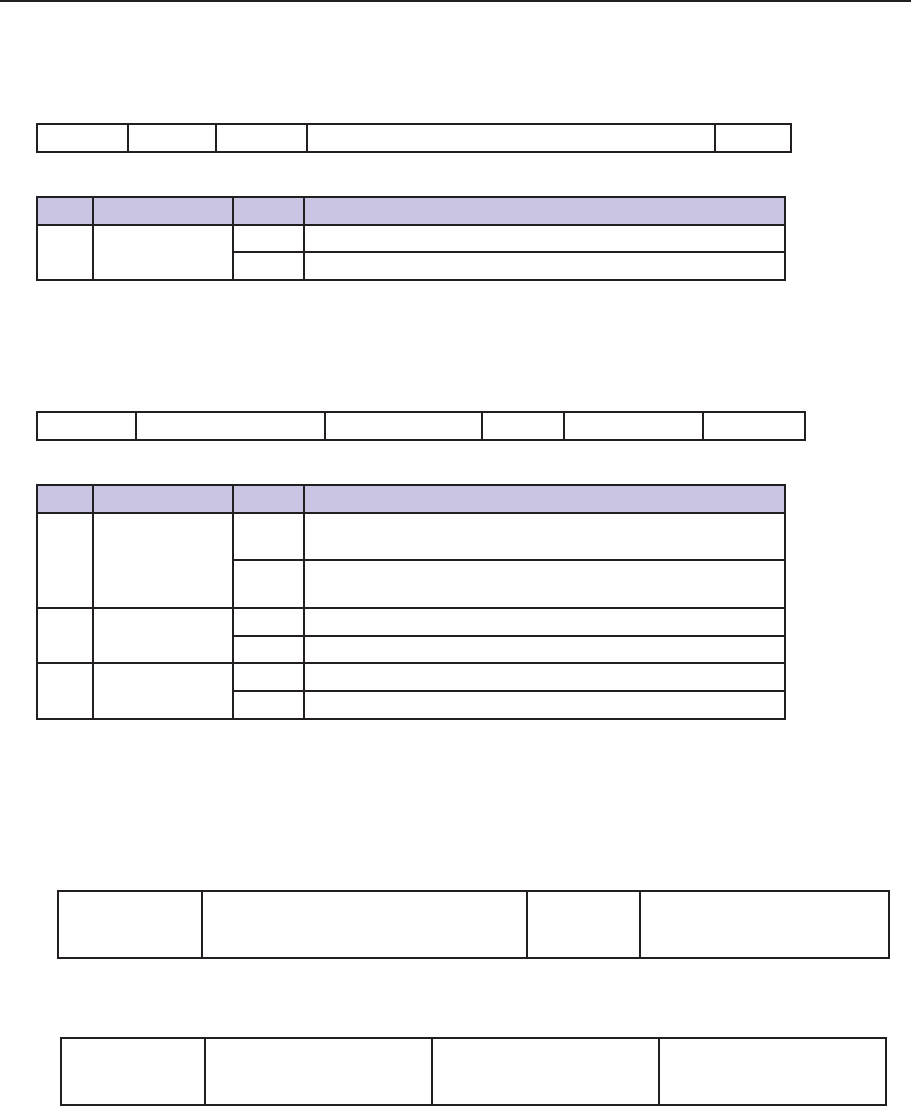
Controlword (6040
h
) of Profile Velocity Mode
15 9 8 7 6 3 0
See 1.3 Halt See 1.3 Reserved See 1.3
MSB LSB
Bit Name Value Description
8 Halt
0 Execute the Motion
1 Stop axis
Table 8.1: Profile Velocity Mode Bits of Controlword
Statusword (6041
h
) of Profile Velocity Mode
9 14 13 12 11 10 9 0
See 1.4 Max Slippage Error Speed See 1.4 Target Reached See 1.4
MSB LSB
Bit Name Value Description
10 Target Reached
0 Halt=0: Target position not reached
Halt=1: Axis decelerating
1 Halt=0: Target position reached
Halt=1: Axis velocity is 0
12 Speed
0 Speed is not equal to 0
1 Speed is equal 0
13
Max Slippage
Error
0 Maximum slippage not reached
1 Maximum slippage reached
Table 8.2: Profile Velocity Mode Bits of Statusword
Object 606C
h
— Velocity Actual Value
This object shall provide the actual velocity value derived either from the velocity sensor or the position sensor.
The value shall be given in microsteps per second.
Object Description
Index
606C
h
Name
Velocity Actual Value
Object Code
VAR
Data Type
Integer 32
Entry Description
Access
ro
PDO Mapping
n/a
Range
Integer 32
Default
n/a