



















What is Pioneer?
AT8 Plus now come with a lower motor-gearhead reduction for faster speeds, even with
much-improved turning power.
CLIENT SOFTWARE
All ActivMedia robots operate as the server in a client-server environment: Their
controllers handle the low-level details of mobile robotics, including maintaining the
platform’s drive speed and heading over uneven terrain, acquiring sensor readings, such
as the sonar, and managing attached accessories like the Gripper. To complete the
client-server architecture, ActivMedia robots require a client connection: software
running on a computer connected with the robot’s controller via the HOST serial link and
which provides the high-level, intelligent robot controls, including obstacle avoidance,
path planning, features recognition, localization, gradient navigation, and so on.
An important benefit of ActivMedia Robotics’ client-server architecture is that different
robot servers can be run using the same high-level client. For example, we provide a
robot simulator that runs on the host machine that can look and act just like your real
robot. With the Simulator, you may conveniently perfect your application software and
then run it without modification on any ActivMedia robot. Several clients also may share
responsibility for controlling a single mobile server, which permits experimentation in
distributed communication, planning, and control.
Currently available client software and development environments for the Microsoft
Windows or Red Hat© Linux-based computing platform of your choice include:
3
ActivMedia Robotics Interface for Applications (ARIA)
SRIsim ActivMedia robot simulator
SRI’s Saphira client-development suite with Colbert
Versions and updates for supported computing platforms are available to password-
registered customers for download from our software website:
http://robots.activmedia.com
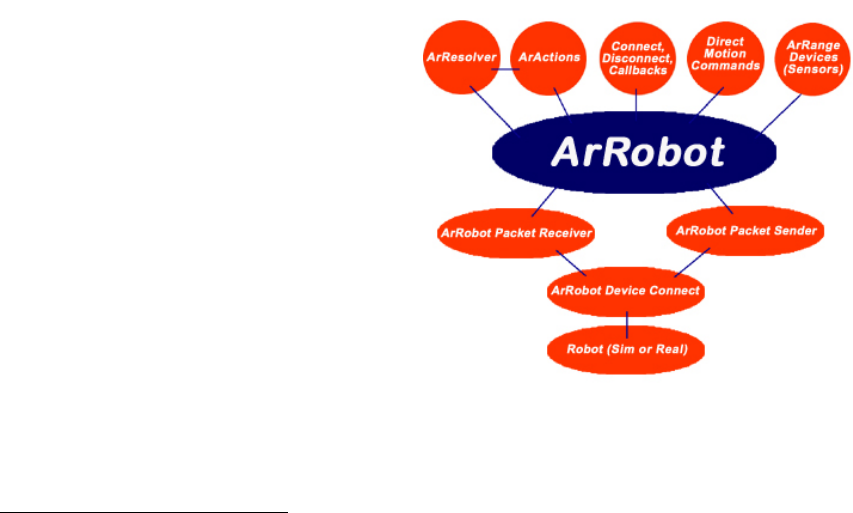
ARIA
The ActivMedia Robotics Interface for
Applications (ARIA) is a C++-based
open-source development environ-
ment that provides a robust client-side
interface to a variety of intelligent
robotics systems, including your
ActivMedia robot’s controller and
accessory systems.
Figure 3. ARIA's architecture
ARIA is the ideal platform for integration
of your own robot-control software,
since it neatly handles the lowest-level
details of client-server interactions,
including serial communications,
command and server-information
packet processing, cycle timing, and
multithreading, as well as a variety of
accessory controls, such as for the PTZ
robotic camera, the P2-Gripper,
scanning laser-range finder, motion gyros, among many others.
6
3
Some software may come bundled with your robot. Other packages require purchase for licensing. Some
software is also available for alternative operating systems, such as Macintosh, SunOS, Solaris, and BSD Unix.