



















ActivMedia Robotics Operating System
CLIENT COMMANDS
AROS has a structured command format for receiving and responding to directions from
a client for control and operation of your ActivMedia robot or the simulator. Client
commands are comprised of a one-byte command number optionally followed, if
required by the command, by a one-byte description of the argument type and then
the argument value.
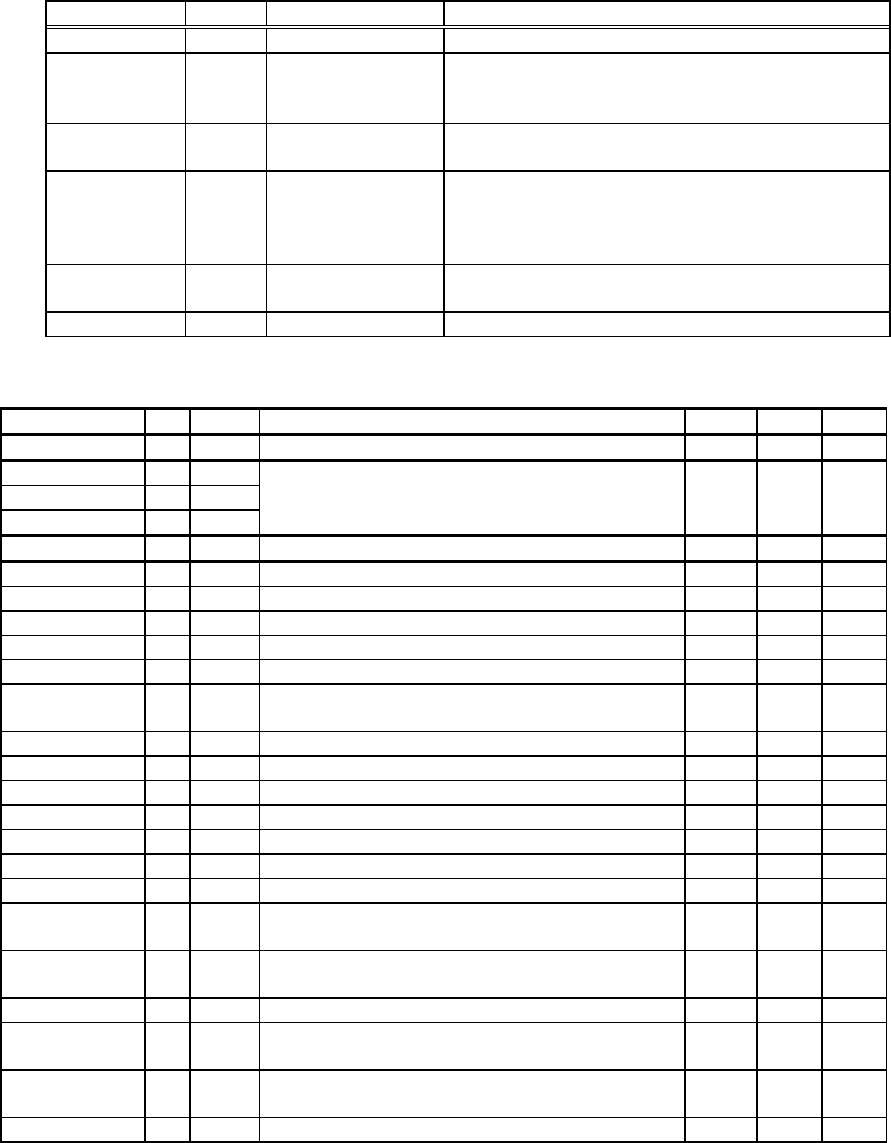
Table 4. AROS/P2OS/PSOS client command packet protocol
COMPONENT BYTES VALUE DESCRIPTION
HEADER 2 0xFA, 0xFB Packet header; same for client and server
BYTE COUNT 1 N Number of command/argument bytes plus
Checksum’s two bytes, but not including Byte Count
itself or the header bytes. Maximum of 249.
COMMAND
NUMBER
1 0 - 255 Client command number;
see Table 7.
ARGUMENT
TYPE
1 0x3B or
0x1B or
0x2B
Required data type of command argument:
positive integer,
negative or absolute integer,
or string (ARGSTR)
ARGUMENT n data Command argument; always 2-byte integer or string
containing length prefix
CHECKSUM 2 computed Packet integrity checksum
Table 5. AROS/P2OS/PSOS command set
COMMAND
#
ARGS DESCRIPTION AROS P2OS PSOS
Before Client Connection
SYNC0 0 none Start connection. Send in sequence. AROS echoes 1.0 1.0 3.x
SYNC1 1 none synchronization commands back to client, and
SYNC2 2 none robot-specific autosynchronization after SYNC2.
After Established Connection
PULSE 0 none Resets server watchdog 1.0 1.0 3.x
OPEN 1 none Starts the AROS servers 1.0 1.0 3.x
CLOSE 2 none Close servers and client connection 1.0 1.0 3.x
POLLING 3 string Change sonar polling sequence (see text) 1.0 1.0 3.9
ENABLE 4 int 1=enable; 0=disable the motors 1.0 1.0 –
SETA 5 sint Translational acceleration, if positive, or
deceleration, if negative; mm/sec/sec
1.0 1.0
–
SETV 6 int Sets maximum translational velocity; mm/sec 1.0 1.0 4.8
SETO 7 none Resets local position to 0,0,0 origin 1.0 1.0 3.x
MOVE 8 sint Translate (+) forward or (-) back mm distance 1.0 1.0 –
ROTATE 9 sint Rotate (+) counter- or (-) clockwise degrees/sec 1.0 1.0 –
SETRV 10 int Sets maximum rotational velocity; degrees/sec 1.0 1.0 4.8
VEL 11 sint Translate at mm/sec forward (+) or backward (-) 1.0 1.0 3.x
HEAD 12 sint Turn to absolute heading; ±degrees (+ = ccw ) 1.0 1.0 4.2
DHEAD 13 sint Turn relative to current heading; (+) counter- or
(–) clockwise degrees
1.0 1.0 3.x
SAY 15 string As many as 20 pairs of duration (20 ms
increments) /tone (half-cycle) pairs
1.0 1.0 4.2
CONFIG 18 none Request configuration SIP 1.0 1.4 –
ENCODER 19 int Request one (1), a continuous stream (>1), or stop
(0) encoder SIPs
1.0 1.4 –
RVEL 21 sint Rotate at (+) counter- or (–) clockwise;
degrees/sec
1.0 1.0 4.2
DCHEAD 22 sint Heading setpoint relative to last setpoint; 1.0
34