


















Updating and Reconfiguring AROS
ROTKP
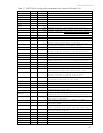
int 30 Proportional PID for rotation
ROTKV
int 200 Differential PID for rotation
ROTKI
int 0 Integral PID for rotation
TRANSACC
int 300 Translational acceleration; mm/sec
2
TRANSDECEL
int 300 Translational deceleration; mm/sec
2
TRANSKP
int 15 Proportional PID for translation
TRANSKV
int 450 Differential PID for translation
TRANSKI
int 4 Integral PID for translation
JOYVELMAX
int 1000 Joydrive maximum translation velocity
JOYRVELMAX
int 50 Joydrive maximum rotational velocity
The Proportional PID (Kp) values control the responsiveness of your robot. Lower values
make for a slower system; higher values make the robot "zippier", but can lead to
overshoot and oscillation.
The Derivative PID (Kv) dampens oscillation and overshoot. Increasing values gives
better control of oscillation and overshoot, but they also make the robot’s movements
more sluggish.
The Integral PID (Ki) adjusts residual error in turning and velocity. Higher values make the
robot correct increasingly smaller errors between its desired and actual angular position
and speed.
TICKSMM AND REVCOUNT
AROS uses the ticksmm and revcount parameters to convert your platform-
independent speed and rotation commands—typically expressed in millimeters or
degrees, respectively—into platform-dependent units.
The ticksmm value is the number of encoder pulses (“ticks”) per millimeter of wheel
rotation. The value is, of course, dependent upon the wheel encoder’s resolution, the
motor-to-wheel gear ratio, and the wheel’s diameter. These don’t normally change, and
so are considered constants and not editable for your robot.
The revcount value is the number of encoder ticks for one full revolution of the robot. It
depends on a number of factors, principally the length of the wheel base, which may
change due to payload, tire wear, operating surface, and so on.
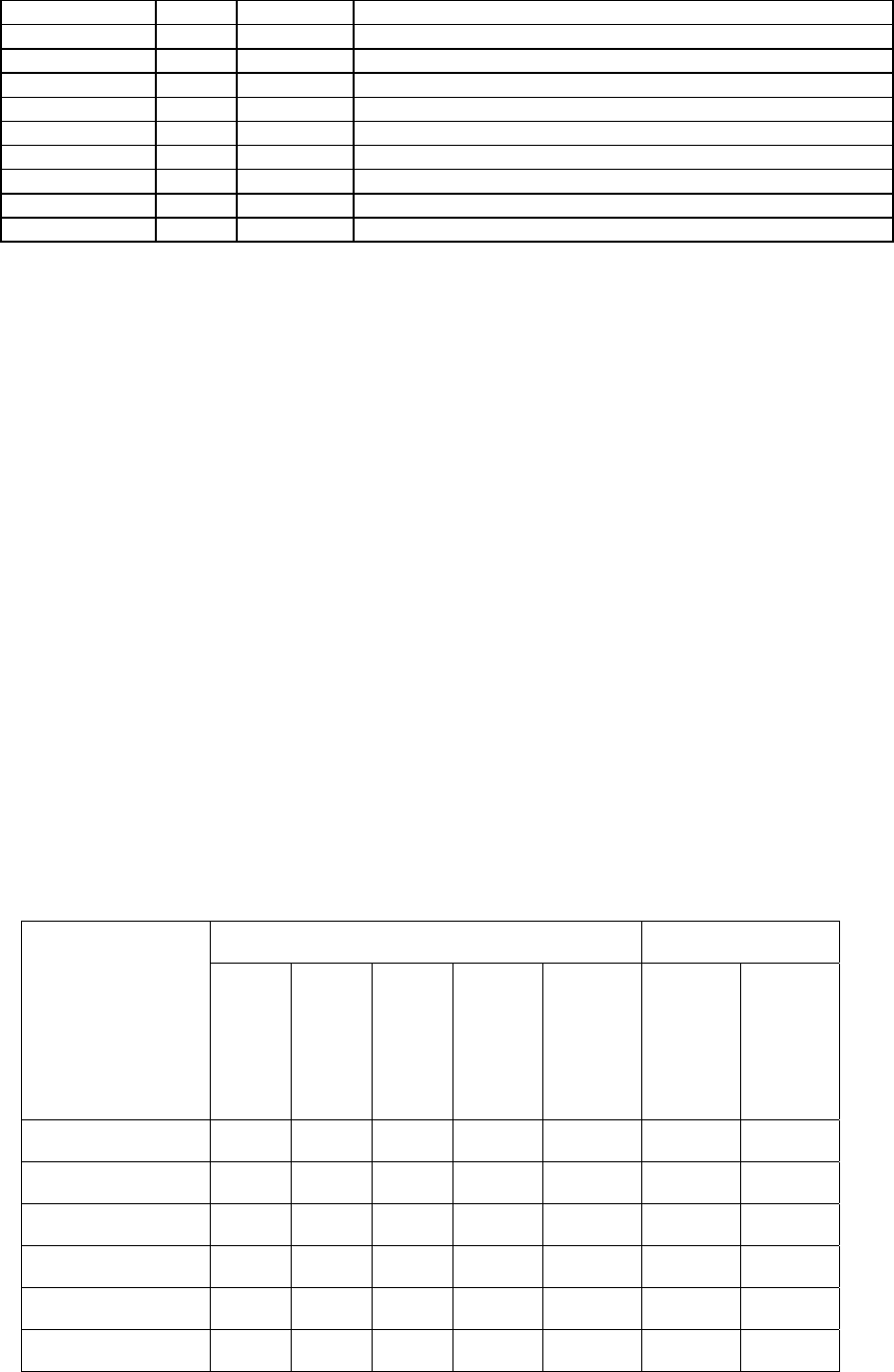
Table 18. Some platform-dependent robot parameter values
Model
PARAMETER DX DXE CE PB V1 P3DX,
PerfPB,
DX8,
DX8 and
PerfPB
Plus
AT,
AT8
P3AT
&
AT8
Plus
ENCODER TICKS/REV 500 500 500 500 500 100 100
GEAR RATIO 19.7 19.7 19.7 38.3 38.3 85.5 57.5
WHEEL DIAM (MM) 165 191 165 165 191 220 220
ENCODER TICKS/MM 76 66 76 148 132 49 138
DISTCONVFACTOR 0.840 0.969 0.826 0.413 0.424 1.32 0.465
DIFFCONVFACTOR 0.0056 0.0057 0.0056 0.0056 0.0060 0.0034 0.0060
58