



















ActivMedia Robotics
What’s more, it comes with source code so that you may examine the software and
modify it for your own sensors and applications.
Saphira
Saphira, including the Colbert language, is a full-featured robotics control environment
developed at SRI International’s Artificial Intelligence Center. Saphira and its ARIA
foundation form the robotics-control and applications-development foundation for most
ActivMedia robot owners and users. The complete, licensed Saphira robotics
development environment, including C/C++ libraries, GUI interface and Simulator, comes
bundled with your ActivMedia robot.
Laser Navigation and Localization
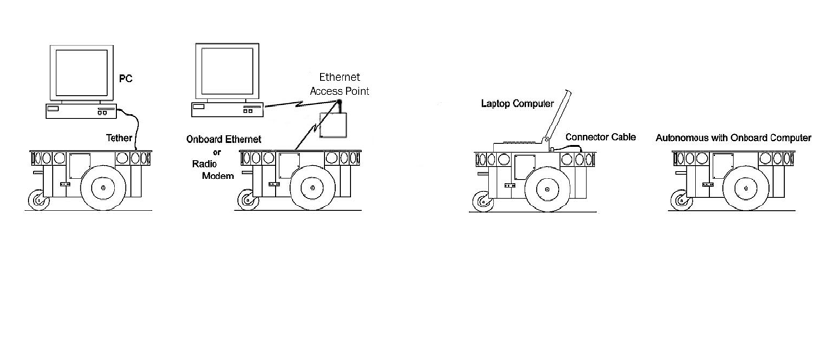
Figure 4. ActivMedia’s robot servers require a computer, typically a Windows
©
- or
RedHat
©
Linux-based PC, to run client software for intelligent robotics command
and control operations.
A separate Laser Navigation and Localization package is available as a Saphira add-on.
It is a comprehensive suite of software tools and applications by which, with your laser-
scanning/range-finder enabled robot, you automatically create, edit, and use maps
and floor plans for advanced robotics applications including localization and gradient
navigation.
SUPPORTING SOFTWARE
Simulator
The SRIsim Simulator is a connection option that provides a virtual replacement for your
ActivMedia robot. By connecting to the simulator instead of a real robot, you can test
your client programs, maps, and so on, when the real robot isn’t practical or available.
Mapper
Mapper provides the tools you need to construct a map of your robot’s real operating
space (“world”).
THE PIONEER LEGACY
Commercially introduced in Summer 1995, Pioneer 1 is the original platform. It came with
a single-board 68HC11-based robot microcontroller and the Pioneer Server Operating
System (PSOS) software. Its low-cost and high-performance caused an explosion in the
number of researchers and developers who now have access to a real, intelligent mobile
robotic platform.
7