



















ActivMedia Robotics
SERVER INFORMATION PACKETS
Like its PSOS and P2OS predecessors, AROS automatically and repeatedly sends a
packet of information over its HOST serial port to a connected client. The standard AROS
SIP informs the client about a number of operating states and readings, using the order
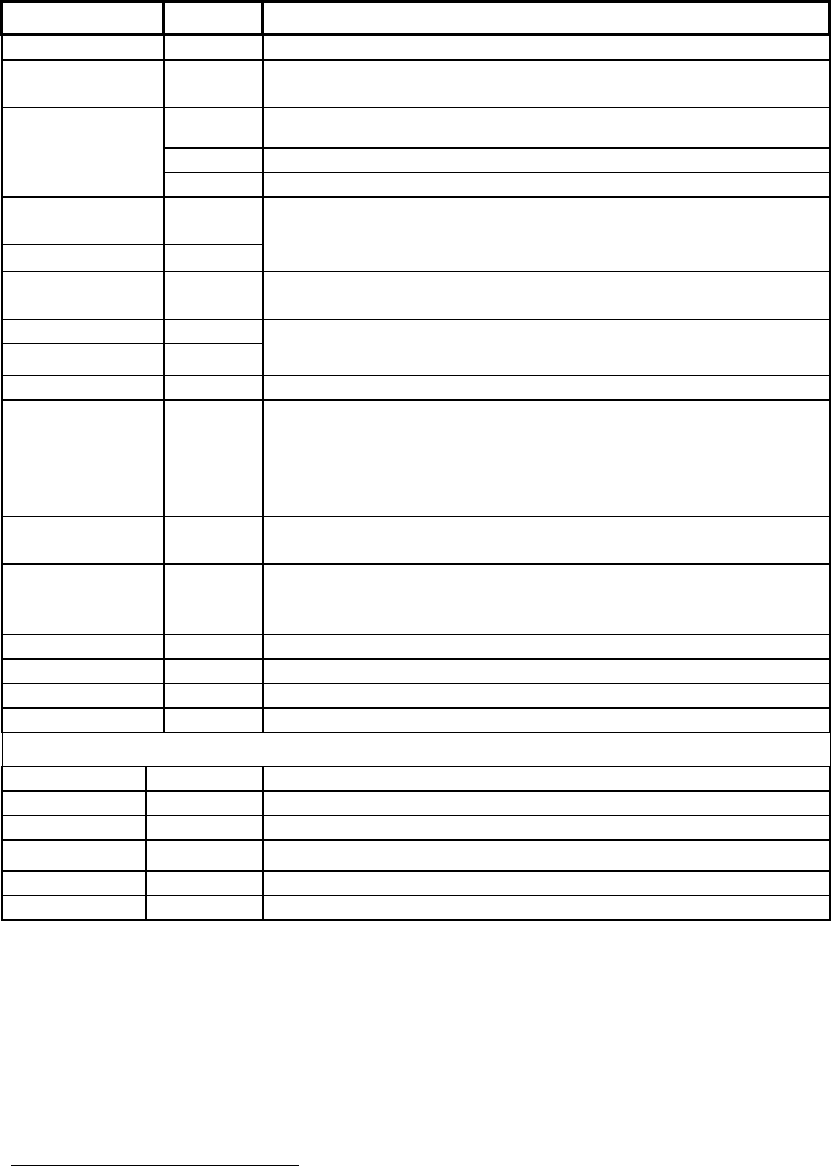
and data types described in the nearby Table.
Table 3. Standard Server Information Packet
NAME VALUE DESCRIPTION
HEADER int Exactly 0xFA, 0xFB
BYTE COUNT byte Number of data bytes + 2 (checksum), not including header or
byte-count bytes
STATUS/PACKET 0x3S = Motors status
TYPE 2 Motors stopped
3 Robot moving
XPOS int Wheel-encoder integrated coordinates; platform-dependent units;
multiply by DistConvFactor
‡
YPOS int to convert to millimeters.
THPOS sint
╪
Orientation in platform-dependent units—multiply by
AngleConvFactor
‡
for degrees.
L VEL sint Wheel velocities in mm/sec (VelConvFactor
‡
= 1.0)
R VEL sint
BATTERY byte Battery charge in tenths of volts (101 = 10.1 volts, for example)
STALL AND
BUMPERS
int Motor stall and bumper indicators. Bit 0 is the left wheel stall
indicator, set to 1 if stalled. Bits 1-7 correspond to the first bumper
I/O digital input states (accessory dependent). Bit 8 is the right
wheel stall, and bits 9-15 correspond the second bumper I/O
states, also accessory and application dependent.
CONTROL sint Setpoint of the server’s angular position servo—multiply by
AngleConvFactor
‡
for degrees
FLAGS sint Bit 0 motors status; bits 1-4 sonar array status; bits 5,6 M-STOP;
bits 7,8 ledge-sense IRs; bit 9 joystick button; bit 10 auto—
charger power-good.
COMPASS byte Electronic compass accessory heading in 2-degree units
SONAR COUNT byte Number of new sonar readings included in SIP
NUMBER byte If Sonar Count>0, is sonar disc number 0-31; reading follows
RANGE int Sonar range value; multiply by RangeConvFactor
‡
…REST OF THE SONAR READINGS…
GRIP_STATE byte Gripper state byte.
ANPORT byte Selected analog port number 1-5
ANALOG byte User Analog input (0-255=0-5 VDC) reading on selected port
DIGIN byte Byte-encoded User I/O digital input
DIGOUT byte Byte-endcoded User I/O digital output
CHECKSUM integer Packet-integrity checksum
‡
Client-side data-conversion factor. Consult the ARIA parameter file your robot.
╪
Explicitly, a signed integer.
AROS also supports several additional SIP types. These include an “alternative” SIP that
currently is not supported by Saphira or ARIA.
15
See following sections in this chapter for a
description of the extended SIP types.
15
Indeed, if enabled, the alternative SIP apparently will “break” the client software. Read carefully.
33