



















HARSFEN0602
−
−
=
MC
CL
PL
]1[
1log
]2[
τ
With this selection, when PL[2] is set to MC, and after the current demand has been zero for a
long time, the amplifier will permit a maximum of PL[2] seconds of peak current, and then
switch to continuous current limiting.
For other settings of PL[1], the maximum time, for which the peak current can be maintained,
after the current demand has been zero for a long time, is -
τ⋅
−
]1[
]1[
1log
PL
CL
seconds.
The programming range for PL[2] is very limited. In most applications we recommend to
leave PL[2] in its 3 seconds factory default.
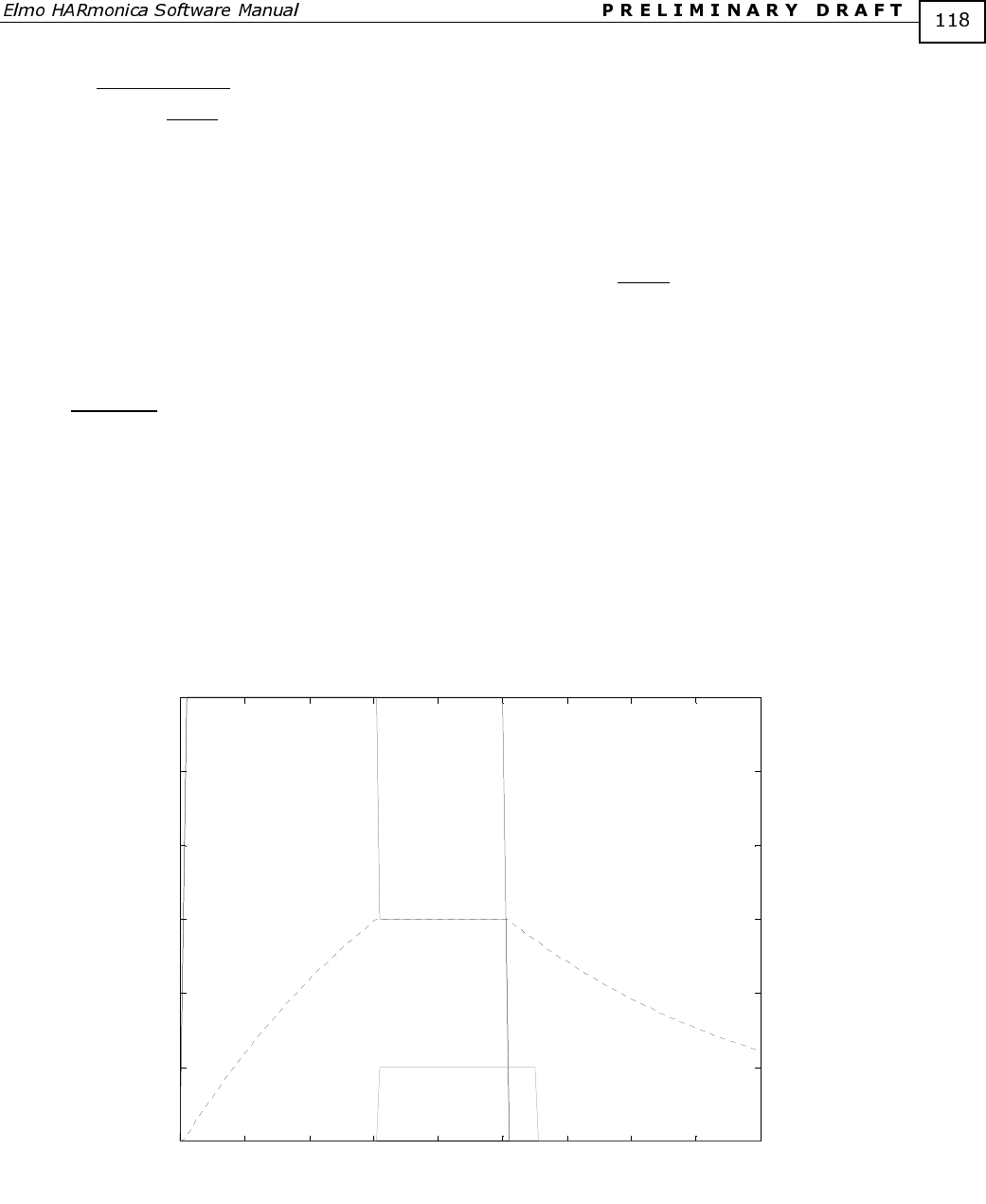
Example:
The graph below shows the signals concerned with the current command limiting process
for MC=6, PL[1]=6, PL[2]=3, and CL[1]=3.
The motor current demand is increases from zero to 6Amp at the time of 0, and is then
decreased to 0 at the time of 5sec.
The state of the low-pass filter increases until it reaches the continuous current limit of 3 at
the time of 3 sec. At that time, the LC flag is raised, and the motor current command is
decreased to CL[1]=3Amp.
After the motor current command is set to zero, the state of the filter begins to drop. When
the state of the filter drops to 2.7Amp = 90% of 3Amp, the LC flag is reset and the torque
command limiting is again to 6Amp.
0 1 2 3 4 5 6 7 8 9
0
1
2
3
4
5
6
Application current demand
motor current
command
Filter state
LC current limit
Ind icatio n
10.2.1 The torque command filter
The torque command filter prevents that abrupt torque commands shall generate large
current overshoots.
The filter is very simple, having a single time constant and a rate limiter.
The parameter XP[6] defines the time constant: