



















HARSFEN0602
PTP or PVT. The position of the conveyer is not known in advance, and it must be
measured on line, for example by using the auxiliary encoder input. The reading of the
auxiliary input is scaled by the follower ratio (FR[3]) parameter, and added to the
software command.
Driving the amplifier as a slave in a larger arrangement. For example, when the
amplifier moves a valve in a pressure control system, its position command may be
an analog output of a pressure controller.
Synchronizing several amplifiers. Several amplifiers may be driven by an auxiliary
encoder signal. Each of the amplifiers uses its ECAM table to derive its own motion
path from the auxiliary signal.
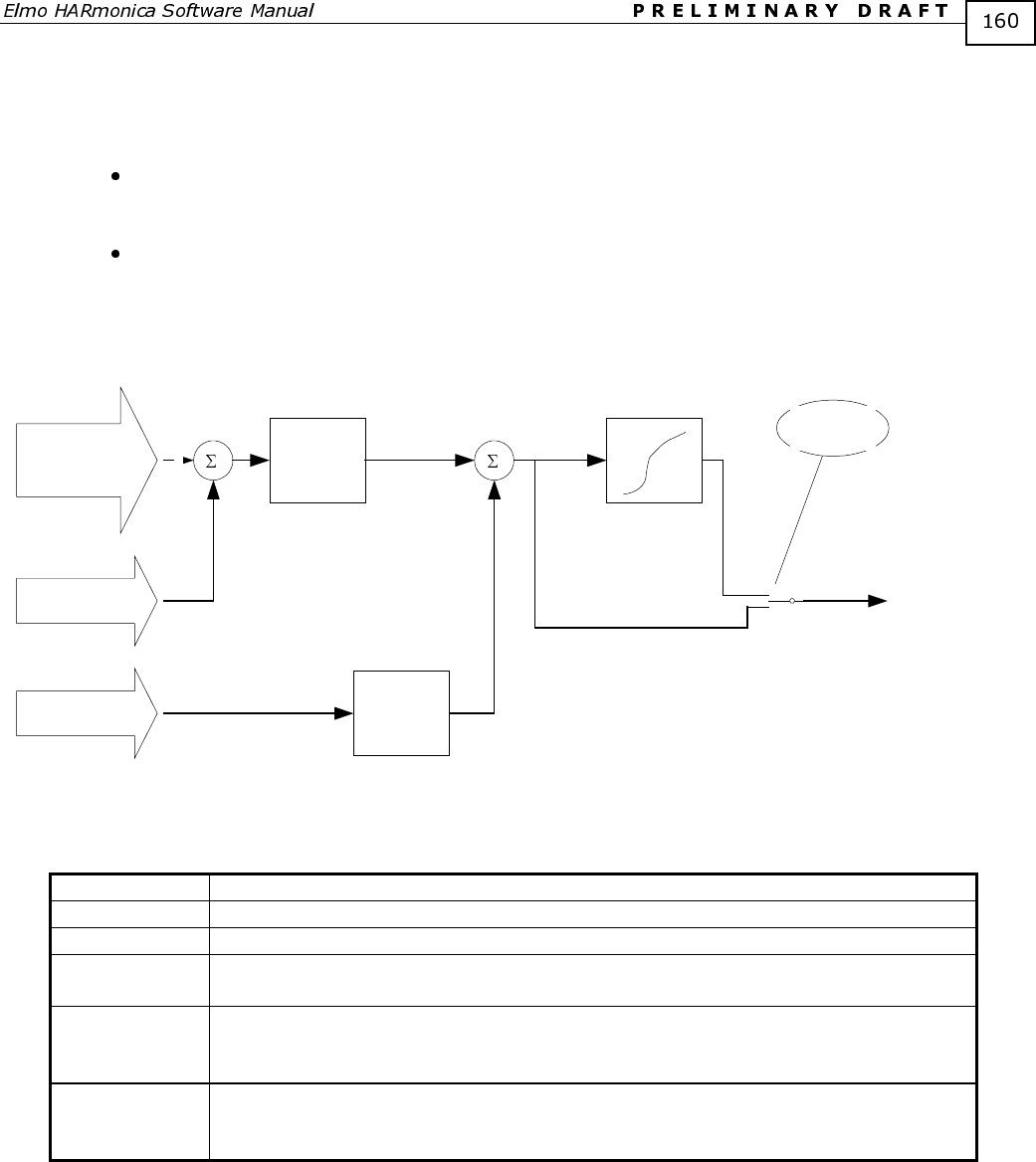
The external position reference is generated by the following scheme:
Auxiliary encoder
input
Analog input 1
(-10 to 10 Volts)
AG[3]
Count/Volt
Auxiliary position
command
AS[1]
`
-
FR[3]
ECAM table
Use ECAM
if EM[1]==1
Figure 30: External position reference generator
The following parameters determine how the position reference is composed:
Parameter Action
AG[3] Scale the analog input. The units of AG[3] are counts/Volt.
AS[1] Offset the analog input. The units of AS[1] are Volts.
FR[3] Scale the auxiliary encoder input. FR[3] is applicable only if the auxiliary encoder is
not used for position feedback.
EM[1] Define if the ECAM table transforms the external reference or not.
EM[1]=0: Do not use ECAM table
EM[1]=1: Use ECAM table for transforming the external command.
RM Define if an external reference is used at all
RM=0: Don’t use external reference
RM=1: Use external reference