



















30 SM-EtherCAT User Guide
www.controltechniques.com Issue Number: 2
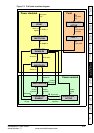
The behavior of the sequencing control is shown in Figure 7-1 CoE state machine
diagram . This state machine indicates how the drive will be controlled. For clarity the
Statusword is abbreviated to ‘SW’ in the diagram.
When in the ‘QUICK STOP ACTIVE’ state, the currently selected mode of operation
indicates how a quick stop function should be handled. When the drive is stopped, and
the Quick stop option code doesn’t indicate that the state should remain at ‘QUICK
STOP ACTIVE’, the state will move to ‘SWITCH ON DISABLED’.
When in the ‘OPERATION ENABLED’ or ‘QUICK STOP ACTIVE’ states it is not
possible to change the mode_of_operation object. This is to ensure that the motor is
stopped before changing the operation mode.
The SM-EtherCAT master device must be in the operational state before the state
machine can move from the ‘SWITCH ON DISABLED’ state to the ‘READY TO
SWITCH ON’ state. If the master leaves the operational state while the state machine is
in the ‘SWITCH ON’, ‘OPERATION ENABLE’ , ‘QUICK STOP ACTIVE’ or ‘READY TO
SWITCH ON’ state then the option will transition to the ‘SWITCH ON DISABLED’ state.
This implies that the drive will be inhibited and the motor will coast.