


















SM-EtherCAT User Guide 37
Issue Number: 2 www.controltechniques.com
Safety
Information
Introduction
Mechanical
Installation
Electrical
Installation
Getting Started Protocols
Drive profile (DSP-402)
support
Advanced
features
Diagnostics
Quick
Reference
Glossary Of
Terms
Index
7.3.12 0x6092 Feed_constant
This is used to configure a feed constant. This is the measurement distance per one
revolution of the output shaft of the gearbox. The feed constant is calculated using the
following formula:
feed constant = feed / driving shaft revolutions
The feed should be provided in user-defined position units
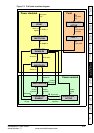
7.3.13 Basic position control
Basic position control is supported on the Unidrive SP in servo mode, closed-loop
vector mode and RFC mode. It works on the Digitax ST and Mentor MP but is not
supported in open-loop or regen mode on any of the drives. If is also not available on
Commander SK or Affinity. The position control described here is used under the
interpolated position mode of operation.
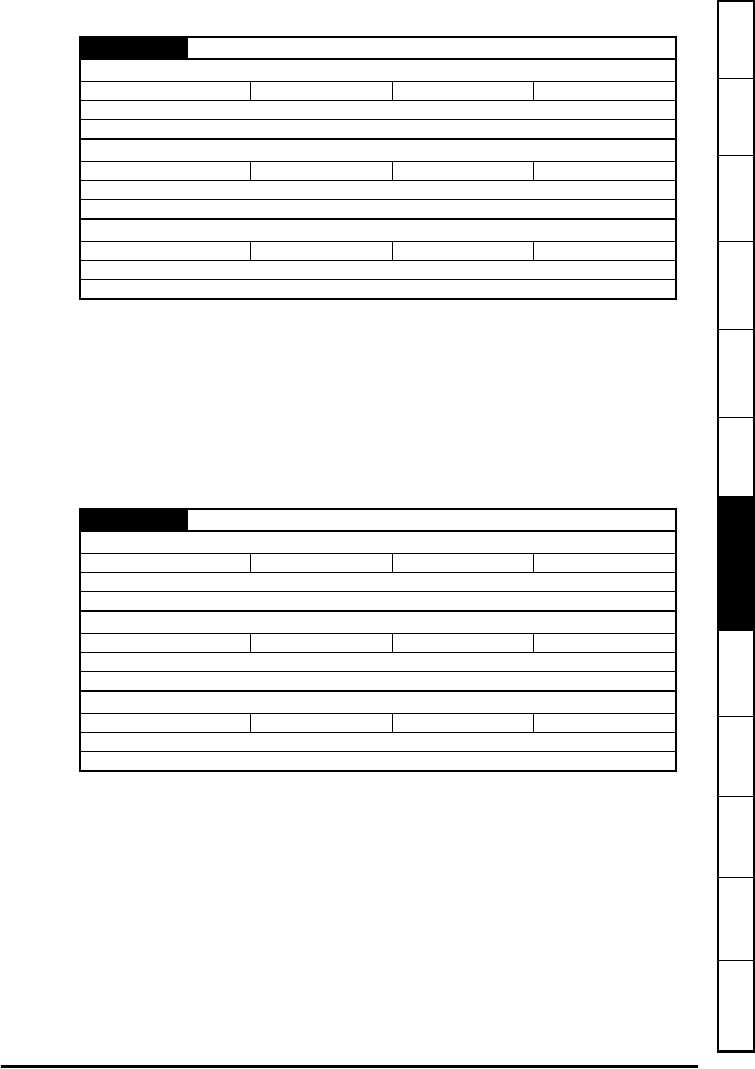
Table 7.24 Gear_ratio
0x6091 Gear_ratio
Sub-index 0
Access: RO Range: N/A Size: Unsigned 8 Unit: N/A
Default: 2
Description:
Sub-index 1
Access: RW Range: 0 to 0xFFFFFFFF Size: Unsigned 32 Unit: N/A
Default: 1
Description: Motor revolutions
Sub-index 2
Access: RW Range: 0 to 0xFFFFFFFF Size: Unsigned 32 Unit: N/A
Default: 1
Description: Shaft revolutions
Table 7.25 Feed_constant
0x6092 Feed_constant
Sub-index 0
Access: RO Range: N/A Size: Unsigned 8 Unit: N/A
Default: 2
Description:
Sub-index 1
Access: RW Range: 0 to 0xFFFFFFFF Size: Unsigned 32 Unit: N/A
Default: 1
Description: Feed
Sub-index 2
Access: RW Range: 0 to 0xFFFFFFFF Size: Unsigned 32 Unit: N/A
Default: 1
Description: Shaft revolutions