


















38 SM-EtherCAT User Guide
www.controltechniques.com Issue Number: 2
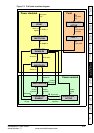
Table 7.26 lists the objects that are supported:
7.3.14 0x6062 Position_demand_value
This read only object is used to provide the currently demanded position value. The
value is given in user defined position units.
7.3.15 0x6064 Position_actual_value
This read only object provides the actual value of the position feedback device. The
value is given in internal units.
7.3.16 0x60F4 Following_error_actual_value
This read only object provides the actual value of the following error. The value is given
in user-defined position units.
Table 7.26 Basic position control supported objects
Index Name
0x6062 position_demand_value
0x6064 position_actual_value
0x6065 following_error_window
0x6067 position_window
0x60F4 following_error_actual_value
0x60FB position_control_parameter_set
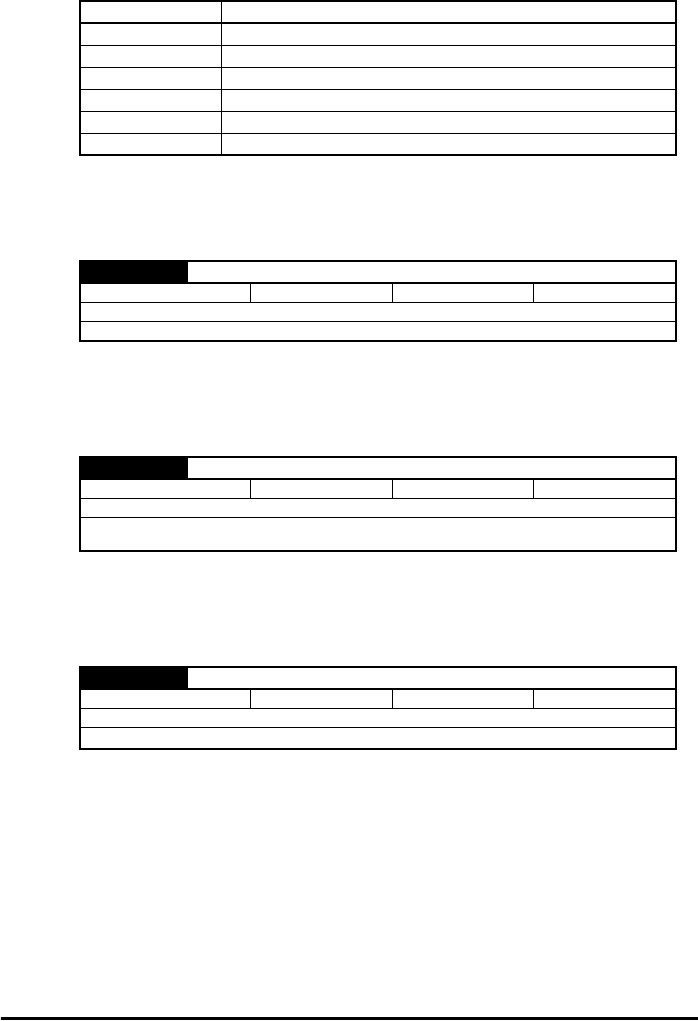
Table 7.27 Position_demand_value
0x6062 Position_demand_value
Access: RO Range: 0 to 0xFFFFFFFF Size: Unsigned 32 Unit: N/A
Default: N/A
Description: Used to provide the currently demanded position value.
Table 7.28 Position_actual_value
0x6064 Position_actual_value
Access: RO Range: 0 to 0xFFFFFFFF Size: Unsigned 32 Unit: N/A
Default: N/A
Description: This read only object provides the actual value of the position feedback device. The value
is given in internal units.
Table 7.29 Following_error actual_value
0x60F4 Following_error actual_value
Access: RO Range: 0 to 0xFFFFFFFF Size: Unsigned 32 Unit: N/A
Default: N/A
Description:
This read only object provides the actual value of the following error.