


















32 SM-EtherCAT User Guide
www.controltechniques.com Issue Number: 2
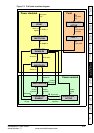
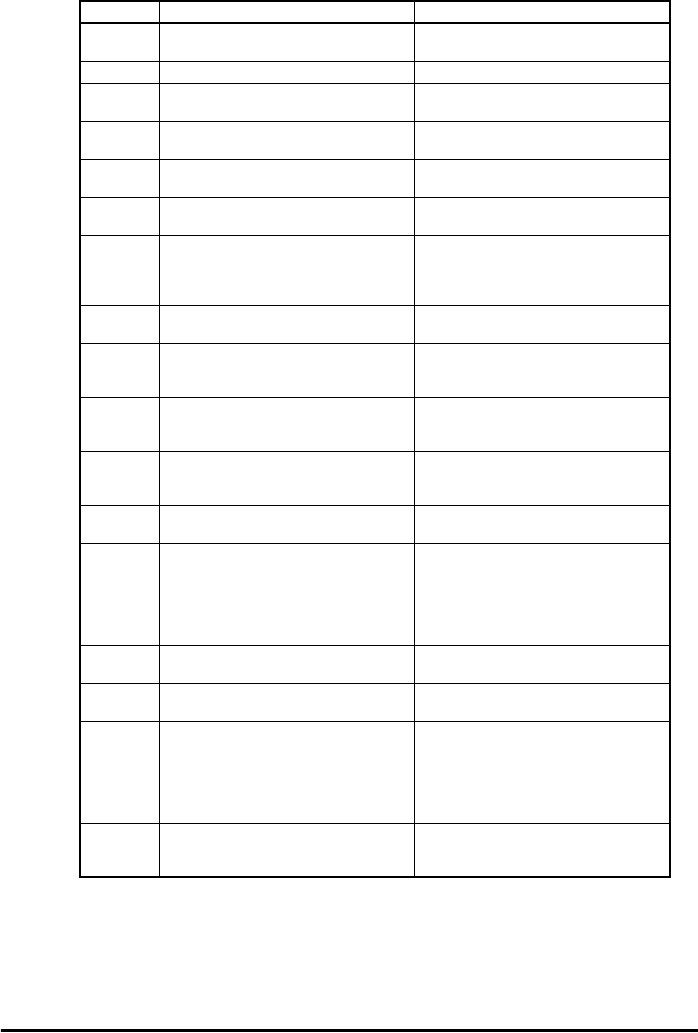
Table 7.8 CoE state machine transition and events
Transition Event(s) Action(s)
0 Automatic transition after power-on or
reset application
Drive device self-test and/or self
initialisation shall be performed
1 Automatic transition Communication shall be activated
2 Shutdown command from control
device or local signal
None
3 Switch on command received from
control device or local signal
Power section shall be switched on if
not already switched on
4 Enable operation command received
from control device or local signal
Drive function shall be enabled and
clear all internal set-points
5 Disable operation command received
from control device or local signal
Drive function shall be disabled
6 Shutdown command received from
control device or local signal
The high-power shall be switched-off
immediately, and the motor shall be free
to rotate if not braked; additional action
depends on the shutdown option code
7 Quick stop or disable voltage command
from control device or local signal
None
8 Shutdown command from control
device or local signal
The high-power shall be switched off
immediately if possible, and the motor
shall be free to rotate if not braked
9 Disable voltage command from control
device or local signal
The high-power shall be switched off
immediately if possible, and the motor
shall be free to rotate if not braked
10 Disable voltage or quick stop command
from control device or local signal
The high-power shall be switched off
immediately if possible, and the motor
shall be free to rotate if not braked
11 Quick stop command from control
device or local signal
The quick stop function shall be started
12 Automatic transition when the quick
stop function is completed and quick
stop option code 1, 2, 3 or 4 disable
voltage command received from control
device (dependant on the quick stop
option code)
The power section shall be switch off
13 Fault signal The configure fault reaction function
shall be executed
14 Automatic transition The drive function shall be disabled; the
high-power may be switched off
15 Fault reset command from control
device or local signal
A reset of the fault condition is carried
out, if no fault exists currently on the
drive device; after leaving the Fault
state, the Fault reset bit in the
controlword shall be cleared by the
control device
16 Enable operation command from control
device, if the quick stop option code is
5, 6, 7 or 8
The drive function shall be enabled