



















44 SM-EtherCAT User Guide
www.controltechniques.com Issue Number: 2
7.5.7 0x6049 vl_velocity_deceleration
This object is used to configure the delta speed and delta time of the slope of the
deceleration ramp.
Example: To decelerate by 800 rpm in 10s, possible values for delta speed and delta
time are 8000 and 100 respectively.
vl_velocity_deceleration = delta speed / delta time
7.5.8 0x604A vl_velocity_quick_stop
This object is used to configure the delta speed and delta time of the slope of the
deceleration ramp for quick stop.
Example: To decelerate by 800 rpm in 10s, possible values for delta speed and delta
time are 8000 and 100 respectively.
vl velocity deceleration = delta speed / delta time
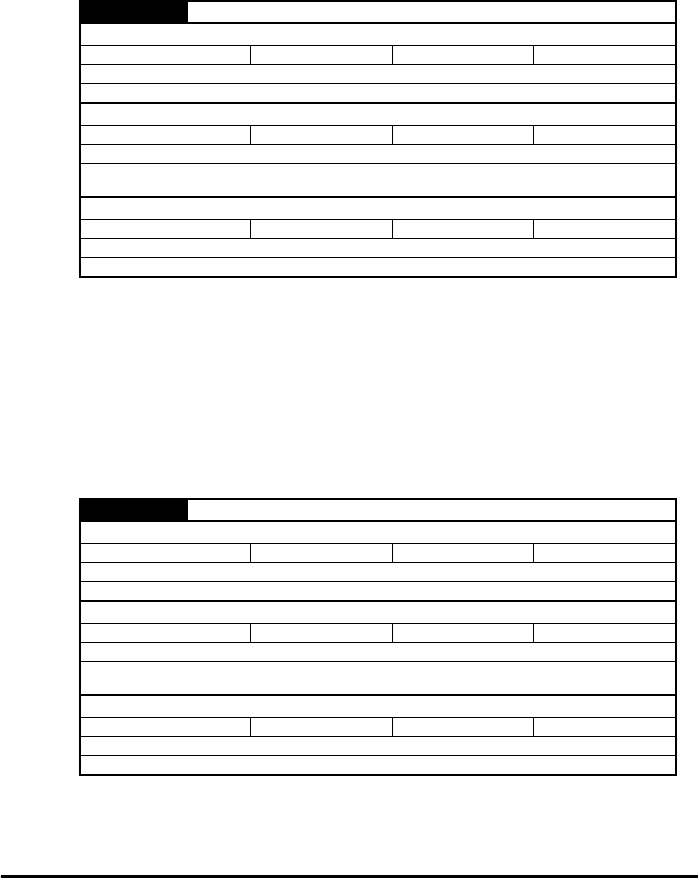
Table 7.43 0x6049 vl_velocity_deceleration
0x6049 vl_velocity_deceleration
Sub-index 0
Access: C Range: N/A Size: Unsigned 8 Unit: N/A
Default: 2
Description: The number of last sub-indexes in this object.
Sub-index 1
Access: RW Range: 0 to 0xFFFFFFFF Size: Unsigned 32 Unit: rpm
Default: 1000
Description: The value of delta speed is given in rpm if the vl_dimension_factor and the
vl_setpoint_factor have the value 1, otherwise the value is in user units.
Sub-index 2
Access: RW Range: 0 to 65535 Size: Unsigned 16 Unit: s
Default: 2
Description: The value of delta time is given in seconds.
Table 7.44 0x604A vl_velocity_quick_stop
0x604A vl_velocity_quick_stop
Sub-index 0
Access: C Range: N/A Size: Unsigned 8 Unit: N/A
Default: 2
Description: The number of last sub-indexes in this object.
Sub-index 1
Access: RW Range: 0 to 0xFFFFFFFF Size: Unsigned 32 Unit: rpm
Default: 1000
Description: The value of delta speed is given in rpm if the vl_dimension_factor and the
vl_setpoint_factor have the value 1, otherwise the value is in user units.
Sub-index 2
Access: RW Range: 0 to 65535 Size: Unsigned 16 Unit: s
Default: 2
Description: The value of delta time is given in seconds.