



















- App.29 -
Appendixes
PrNo.
Parameter
Range Function
description
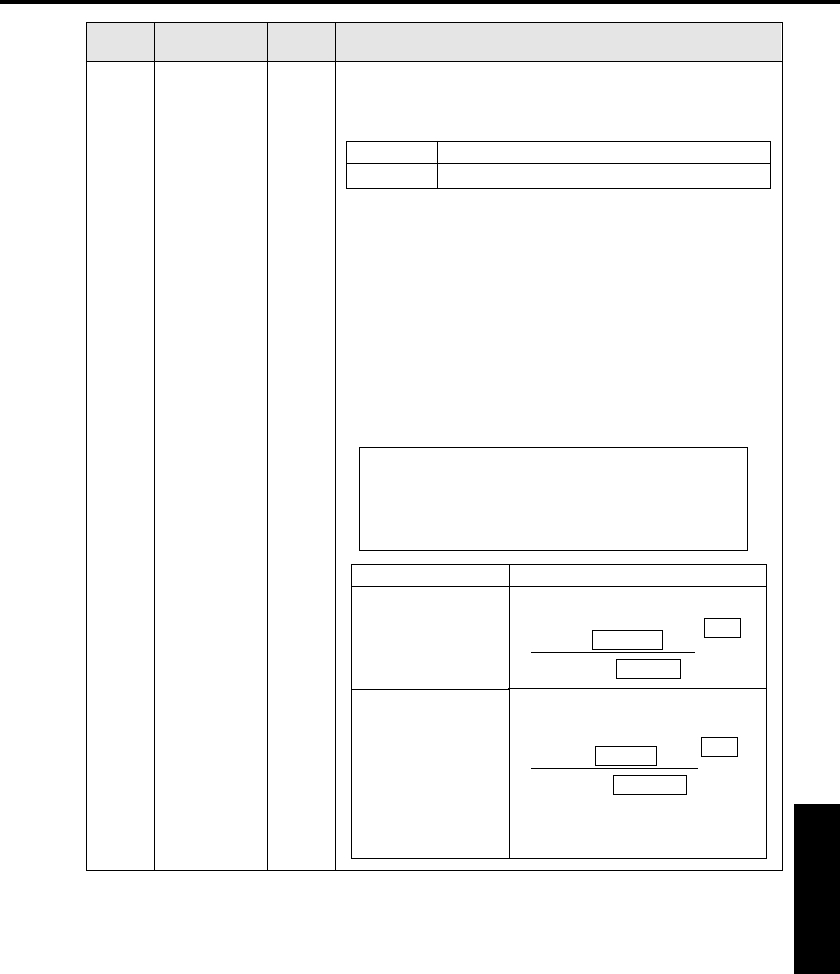
You can select the numerator of the command scalar.
*1 Select the 1st. or 2nd. numerator with scalar input switching (DIV: CN I/F
Pin 6) .
<Example>
• Basic relation is defined so as the motor runs one revolution with the
command input of encoder resolution(f), when the scale ratio is 1.
Therefore, when the encoder resolution is 10000 P/r, it is necessary to
enter f=5000 pulses in case of scale ratio of 2, and f=40000 pulse in case
of scale ratio of 1/4 to turn the motor one revolution.
• Set-up the Pr46, Pr4A and Pr4B so that the post-scaling inter nal command
(F) equals the resolution (10000) of the encoder.
F = f x (Pr46 x 2
Pr4A
)/Pr4B = 10000
F: Internal command pulse counts required for motor one revolution
f: Command pulse counts required for motor one revolution
46
~
4B
DIV off
DIV on
1st numerator (Pr46) selection
2nd numerator (Pr47) selection
(continued)
10000 (2500P/r x 4)
Pr 46 10000 x 2
Pr 4B 5000
Pr 46 2500 x 2
Pr 4B 10000
Pr 4A
0
Pr 4A
0
Resolution of encoder
Example 1:
Command input (f) is
5000 pulses per
one revolution
Example 1:
Command input (f) is
40000 pulses per
one revolution.
However, if frequency of
input pulses is 500 kpps,
motor speed is 750 r/
min.