


















- 51 -
The auto gain tuning affects the values of the following six parameters.
• Pr15 (Velocity Feed Forward) will be automatically changed to 0%, if the auto gain tuning is
executed.
<Notes>
The real time auto gain tuning will be disabled in the following cases:
1) Running pattern at a constant speed
2) Running pattern with a small acceleration/deceleration
Relationship between Gain Adjustment and Mechanical Stiffness
To increase the mechanical stiffness,
1) The machine (motor load) should be firmly secured to a rigid foundation.
2) The coupling between the motor and machine should be a high-stiffness special one designed
for servo motors.
3) The timing belt should have a larger width. The tension of the timing belt should be adjusted
according to the allowable axial load of the motor.
4) The gears should have a smaller backlash characteristic.
• The inherent frequency (resonance) of the machine significantly affects the gain adjustment of the
servo motor. If the machine has a lower resonance frequency (i.e. lower stiffness), you can't set
the high response of the servo system.
Preparations and Adjustments
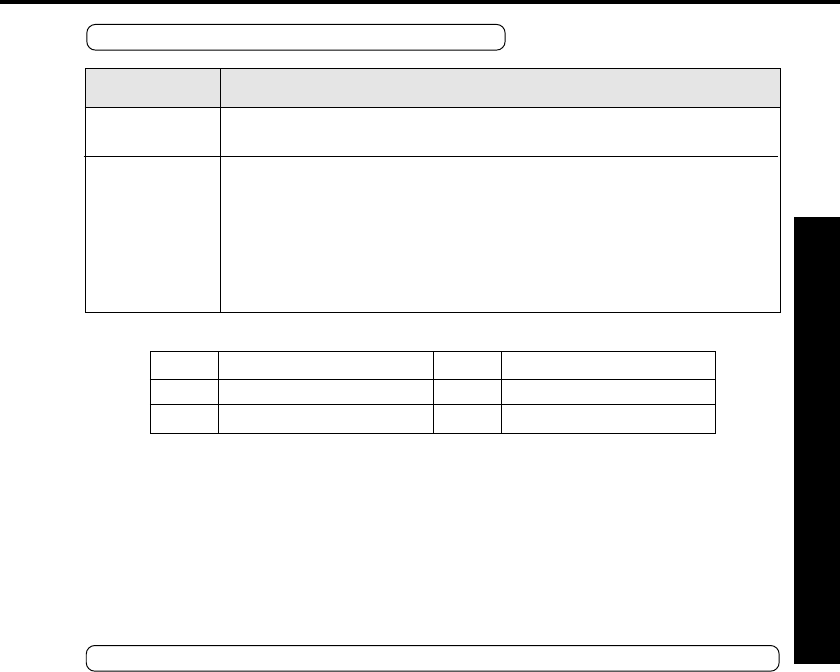
Applicability of Automatic Adjustment
Pr10
1st Position Loop Gain
Pr13
1st Speed Detection Filter
Pr11
1st Velocity Loop Gain
Pr14
1st Torque Filter Time Constant
Pr12
1st Velocity Loop Integration Time Constant
Pr20
Inertia Ratio
Item Conditions
•
Must be at least three times as large as the motor inertia, but not greater than 20 times.
•
Must not fluctuate much
•
The machine (motor load) and its coupling must have a higher mechanical stiffness.
•
The backlash of the gears and other equipment must be small.
•
Eccentric load must be smaller than one-fourth of the rated torque.
•
The viscous load torque must be smaller than one-fourth of the rated torque.
•
Any oscillation must not cause any mechanical damages of the machine (motor load).
•
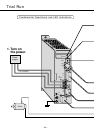
Two CCW turns and subsequent two CW turns must in no case cause any troubles.
Load inertia
Load