



















- 71 -
Important information
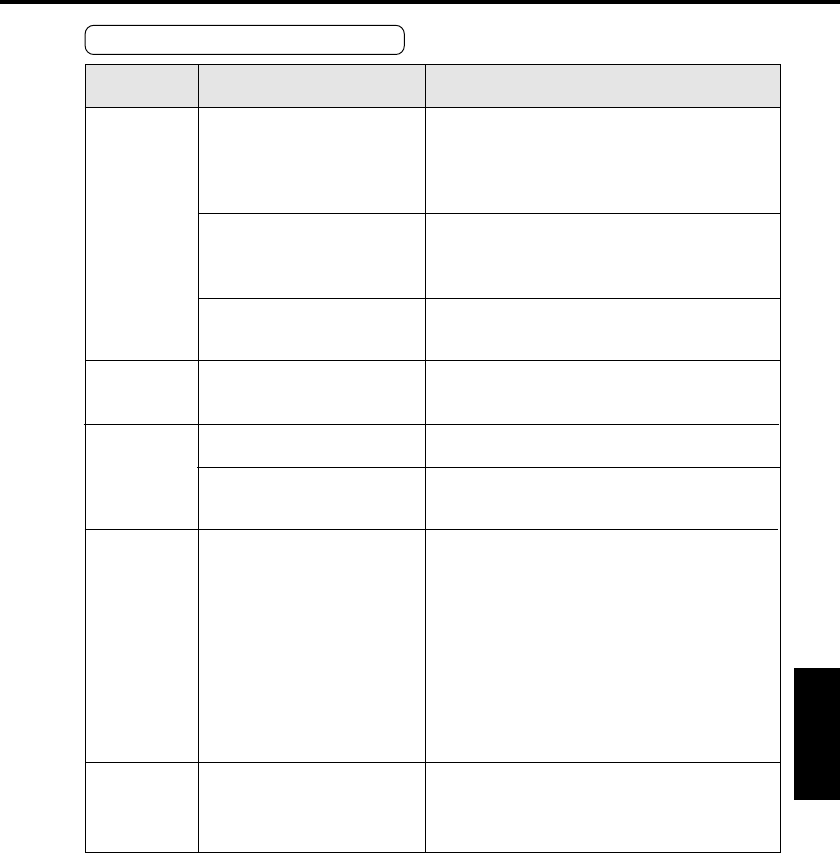
Positioning accuracy is bad.
Category
System
Adjustment
Parameter
Wiring
Installation
Causes
Position commands (amount of
command pulses) are not cor-
rect.
Reading of in-position signals
occurs at the edge.
The form and width of the com-
mand pulses deviate from the
specified values.
The position loop gain is too
small.
The setting of in-position detec-
tion range (Pr60) is too large.
The command pulse frequency
exceeds 500 kpps.
CN I/F signals are chattering:
1) Servo-ON signals
2) Counter clear input
Load inertia is large.
Countermeasures
Count the number of feedback pulses on the monitor
screen of PANATERM
“
while repeating travel to back
and forth within a fixed distance. If the number of
feedback pulses varies, adjust the controller. Take
measures to reduce the noise on the command pulse.
Use the waveform graphic screen of PANATERM
“
to monitor the position error when the in-position
signals are received. Read the in-position signals at
a mid point on the time span, not at the edge.
If the command pulses are deformed or narrowed,
adjust the pulse generation circuit. Take measures
to reduce the noise on the command pulse.
Check the amount of position error
on the monitor
screen of PANATERM
“
. Increase the value of Pr10
to the extent that no oscillation occurs.
Decrease the value of Pr60 (in-position range) to the
extent that the in-position signals do not chatter.
Decrease the command pulse frequency. Change the
values of Pr46 through Pr47 (numerator of 1st to
2nd command scale).
1) Check the wiring and connections between CN I/F pins 2
and 13 by monitoring the display of input and output sig-
nals status. Modify the wiring so that Servo-ON signals
can be made active correctly. Check the controller.
2) Check the wiring and connections between CN I/F pins 4
and 13 by monitoring the display of input and output sig-
nals status.
Modify the wiring so that the position error
counter clear input cannot be made active during op-
eration. Check the controller.
Check the overshoot at stop using the wave form graphics
function of PANATERM
“
. Adjust the gains. If this is not ef-
fective, increase the capacity of the amplifier and motor.