



















- App.34 -
Details of Parameters
PrNo.
Parameter
Range Function
description
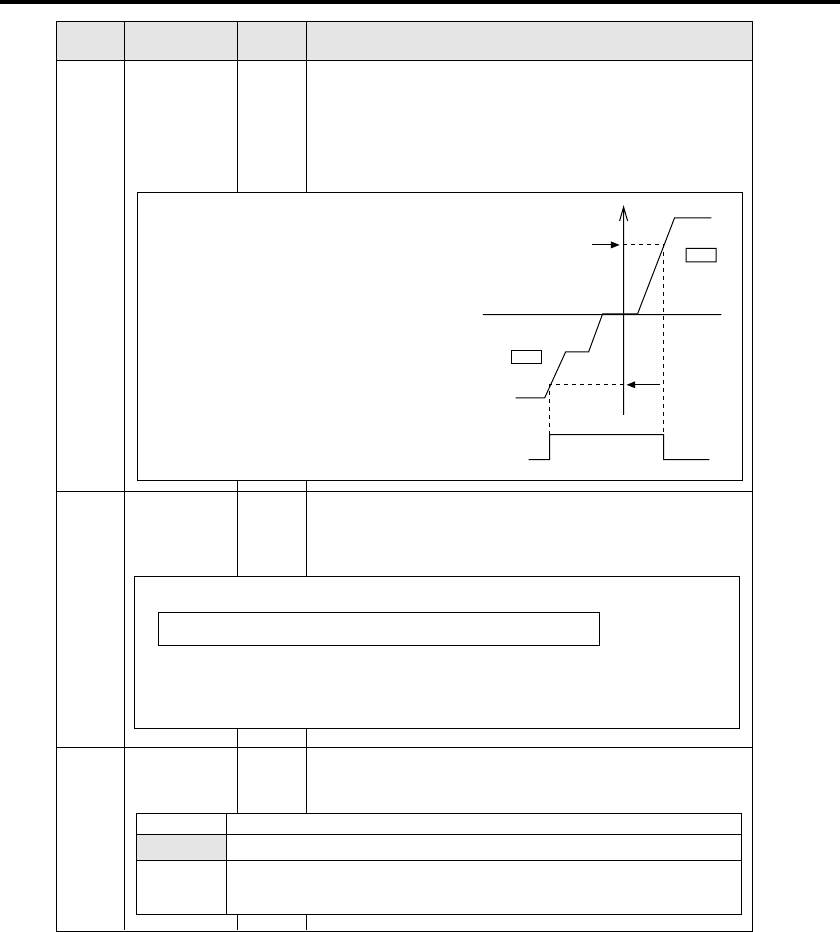
• You can set-up the output timing of at-speed signal (COIN:
CN I/F 10 pin) by setting motor speed [r/min] in internal
velocity control mode.
•
The at-speed signal (COIN) is output, when the motor speed
exceeds set value of this parameter Pr62.
• You can set-up the detection level for the position error
limit at [Position error limit protection], with error counter
pulses.
You can disable the position error limit protection.
62
63
64
At-speed
Position error
limit protection
Position error
invalidation
0 ~
10000
[1000]
0 ~
32767
[1875]
0 ~ 1
• Calculate the value of this parameter using the following formula.
Parameter value = [Position error limit level (pulses)]/256
<Note>
If you set the position gain to low value, and set this Pr63 value too small, the position
error limit protection could be activated, even though no unusual situation is to be found.
Setting of Pr62 works in both CW/CCW
directions regardless of rotational direction
of motor.
Speed
CW
COIN
Off On
CCW
Pr62
Pr62
Position error limit protection
Enabled
Disabled. The motor continues to run, even though the pulse counts exceeds
the level set by Pr63, judging that no
unusual situation
is found.
Value
[ 0 ]
1