



















Setup & Operation 5. Motion Range
60 G10 / G20 Rev.2
5.1.3 Max. Pulse Range of Joint #3
The 0 (zero) pulse position of Joint #3 is the position where the shaft is at its upper limit.
The pulse value is always negative because Joint #3 always moves lower than the 0 pulse
position.
Upper limit: 0 pulse
Model Joint #3 Stroke Minimum Limit Pulse
G10/G20-**1S* 180 mm
-1946420
G10/G20-**4S* 420 mm
-2270823
G10/G20-**1C* 150 mm
-1622016
G10/G20-**4C* 390 mm
-2108621
)
NOTE
For the Cleanroom-model
(G10/G20-***C*), the motion range set with the Joint #3
mechanical stop cannot be changed.
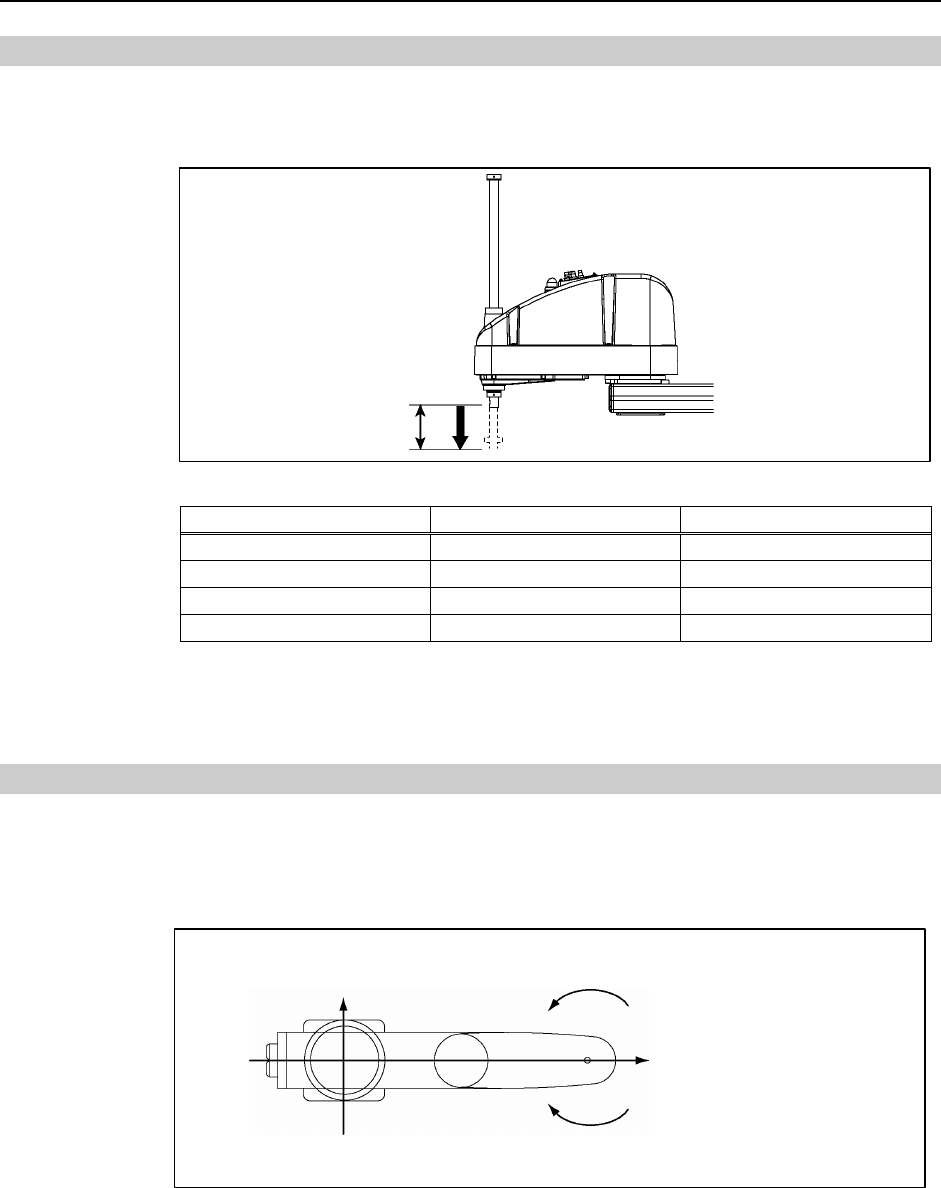
5.1.4 Max. Pulse Range of Joint #4
The 0 (zero) pulse position of Joint #4 is the position where the flat near the end of the
shaft faces toward the end of Arm #2. With the 0 pulse as a starting point, the
counterclockwise pulse value is defined as the positive (+) and the clockwise pulse value
is defined as the negative (-).
+Y
+X
Clockwise (-value)
Counterclockwise (+value)
G10
0 pulse ±1951517 pulse
G20
0 pulse ±2752512 pulse