



















Quattro DC Drive Sequencing
Drive Sequencing
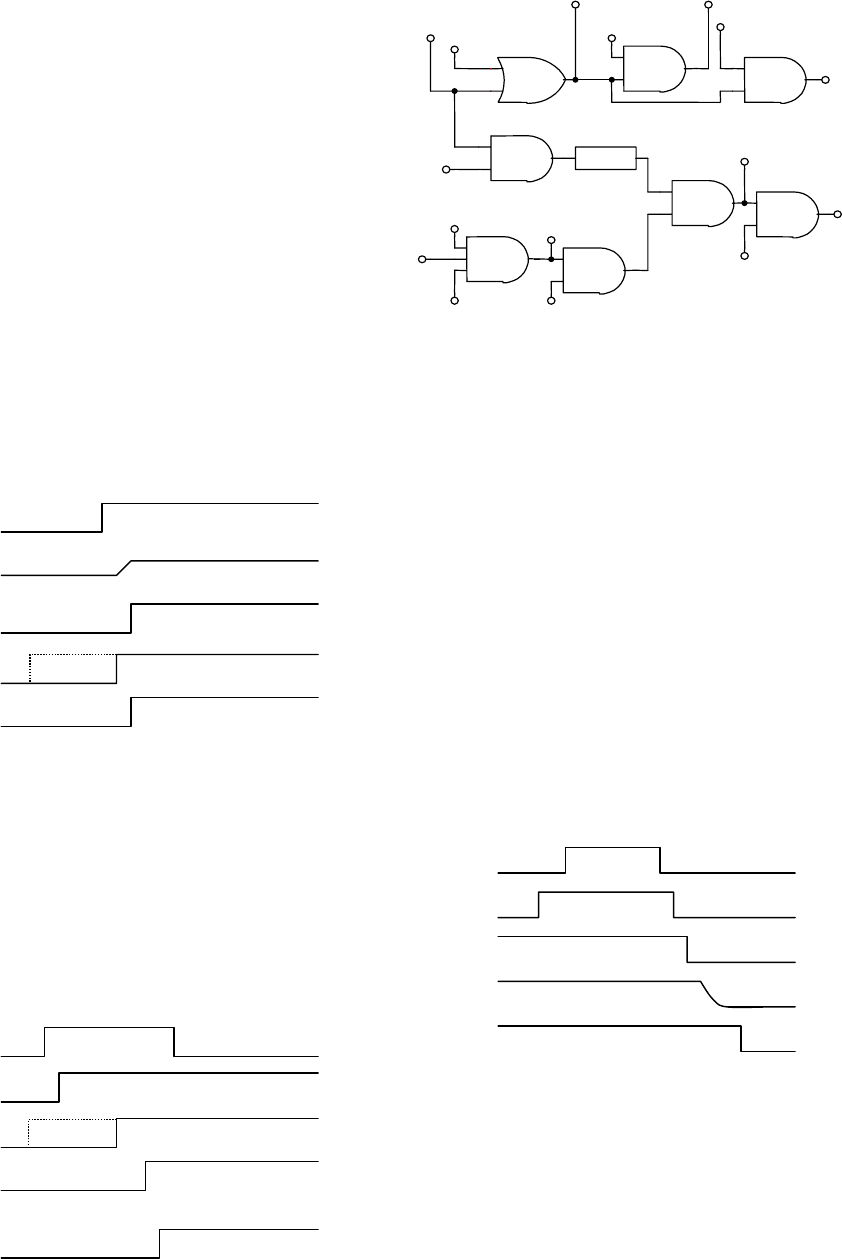
NORMAL operating sequence
1. Motor field current is at Stand-By during
drive idle. The No Faults relay is active.
Full-Field and Run command signals are
OFF. Motor contactor Safety circuits may
be open or closed. The DC bus will
remain charged with regulated voltage as
long as the drive is providing motor field
current.
2. A Field Enable Command, programmable
by FLD ENA SRC (C1), is sent to the
drive. If the DC bus is not pre-charged, a
pre-charge cycle will be completed before
motor field current is restored. See
Quattro Pre-Charge on page 22 for timing
information of the Pre-Charge circuit.
Motor field current will go to the Full-Field
value in preparation to produce motor
torque.
3. Pre-Torque command value is sent to the
drive. It must be available before a run
command is given. If the Pre-Torque
Latch is used, see Pre-Torque Latch (C1),
it can be placed inactive depending on the
settings of Pre-Torque Latch Clk (C1). If
latching is not used, it must remain active
until the SPD REG RLS output is active.
Safety circuit relays are closed making
power available to the contactor coil
circuit.
4. Once the regulators are released, motor
current starts at pre-torque amperes. The
velocity regulator starts at zero speed. (All
conditions of 3. must be present and motor
field current must be greater that the
sensing threshold before the drive will Start.
This is noted by the output Flux Confirm
(programmable by Flux Cnfrm Level (A6)).
Field Enable
5. Drive activates elevator Brake relays, if
programmed to do so (or the car controller
does it externally).
Stndy Fld
Motor Field
Full Fld
6. Drive follows the external or internal
velocity profile via the programmed
accel/decel rate as programmed during the
remainder of the elevator run cycle.
FLUX CFRM
(logic output)
Stand-by On
Pick Contactor
Drive Enable
(input)
Pre-charge Cnfrm
Pre-charge
Speed Reg Release
Speed Ref
Release
Run Command
(input)
Brake Release
Boost On Confirm
Flux Confirm
No Faults
Field
Control
On
Field Enable (input)
Contact Cfirm
Boost On
LATCH
Drive Enable
7. When at the next landing...the Drive (or
car controller) de-activates elevator Brake.
Run
8. After the Brake has set, the Run command
is removed causing...
9. Reference speed to be clamped to zero.
10. Motor torque ramps down to zero, then the
Motor contactor is opened.
SPD REG RLS (logic output)
Run
Brake Relay
Torque
Motor Contactor
Pre-Torque
11. While idle, motor field current reference will
drop to Stand-By, after the Full-Field timer
expires. Safety circuit relays may (or may
not) open to remove contactor-actuating
power.
Run
Safety Chain
CONTACT
CFRM (input)
12. A DSPR time-out may occur while field
current is at stand-by. In that case motor
field current goes to zero and the AC main
power contactor to the drive is opened. A
pre-charge cycle and power on recovery
will occur on the next command to re-
establish motor field current.
SPD REG RLS
(output)
21