



















2-265
2 Instructions
CP1E CPU Unit Instructions Reference Manual(W483)
Data Control Instructions
2
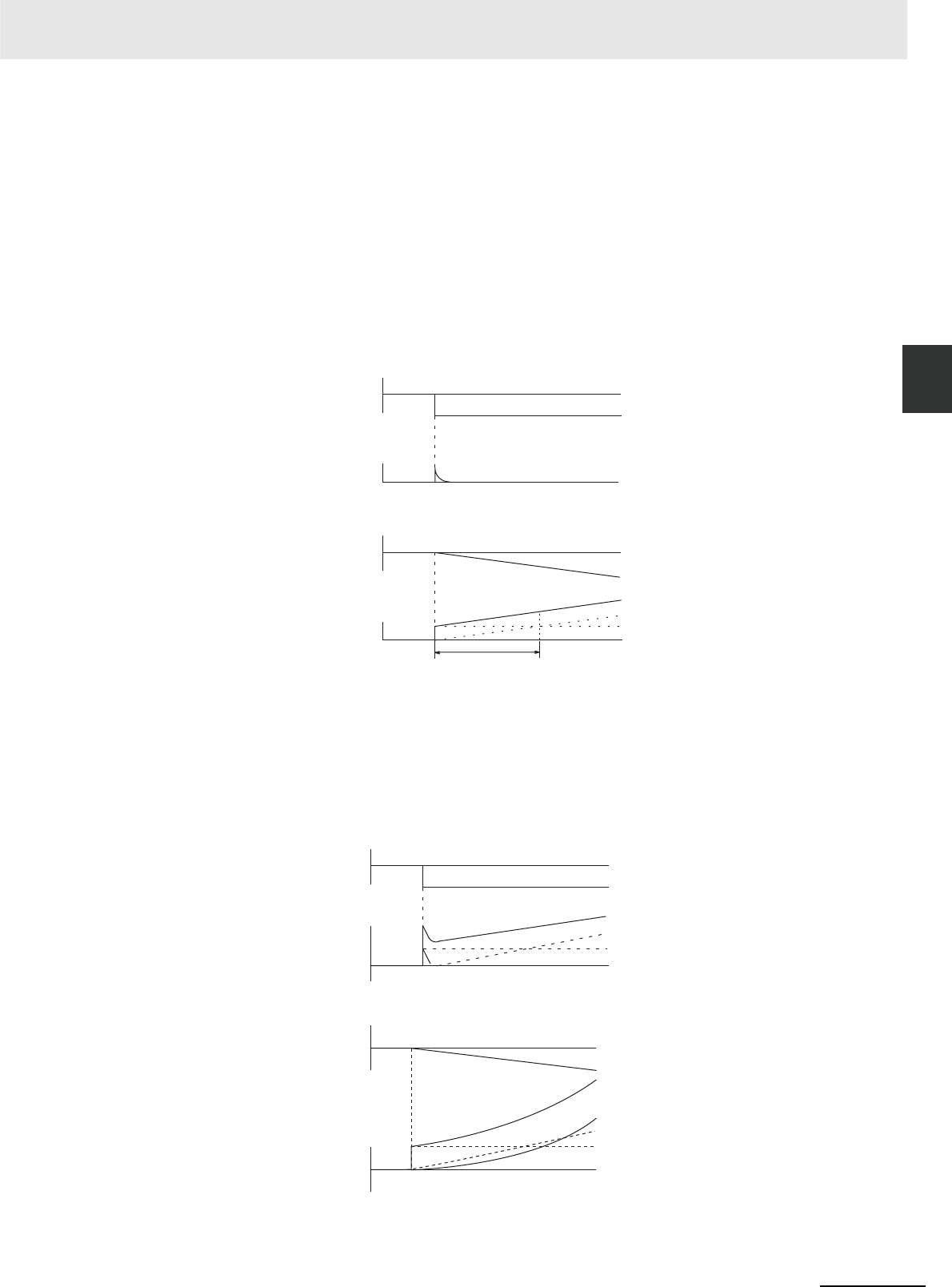
PIDAT
Derivative Action (D)
Proportional action and integral action both make corrections with respect to the control results, so
there is inevitably a response delay. Derivative action compensates for that drawback. In response to a
sudden disturbance it delivers a large manipulated variable and rapidly restores the original status. A
correction is executed with the manipulated variable made proportional to the incline (derivative
coefficient) caused by the deviation.
The strength of the derivative action is indicated by the derivative time, which is the time required for the
manipulated variable of the derivative action to reach the same level as the manipulated variable of the
proportional action with respect to the step deviation, as shown in the following illustration. The longer
the derivative time, the stronger the correction by the derivative action will be.
PID Action
PID action combines proportional action (P), integral action (I), and derivative action (D). It produces
superior control results even for control objects with dead time. It employs proportional action to provide
smooth control without hunting, integral action to automatically correct any offset, and derivative action
to speed up the response to disturbances.
0
0
0
0
Ramp response
Step response
PD action
P action
D action
Td: Derivative time
Manipulated
variable
Deviation
Manipulated
variable
Deviation
Derivative Action
PD Action and Derivative Time
0
0
0
0
PID action
I action
P action
D action
Step response
PID action
I action
P action
D action
Ramp response
Manipulated
variable
Manipulated
variable
Step Response of PID Control Action Output
Ramp Response of PID Control Action Output
Deviation
Deviation