



















ADVANCED MICRO SYSTEMS, INC. SERIAL INTERFACE
27
Anatomy of Instruction Execution
This information is intended to familiarize the programmer with the internal operations involved in executing
a command.
For each MOTION command there are four cycles; Entry, Execution, Result, and Completion. Other
commands have three cycles; Entry, Execution and Result. In the idle state the controller continually tests
for jog, go, or command input. The following describes each operation that takes place on receipt of a
command.
Cycle 1: Entry
A. Serial command and data information is placed in a command line buffer as received. Editing is permitted
in SINGLE axis mode. ESCape aborts operation and returns to idle state. A carriage RETURN (Line Feed for
Daisy Chain) terminates the entry cycle and initiates execution.
Cycle 2: Execution
The command is processed. In the case of two consecutive action commands, execution will be delayed until
any previous completion cycle has been completed.
Cycle 3: Result
The result cycle outputs any numerical result required by the command, i.e., the position. The result type is
signed numerical data, preceded by space padding and followed by a Carriage Return and Line Feed. If the
result does NOT produce numeric data then the Carriage Return, Line Feed output indicates execution is
complete.
Cycle 4. Completion
The completion phase is required for any Action command cycle.
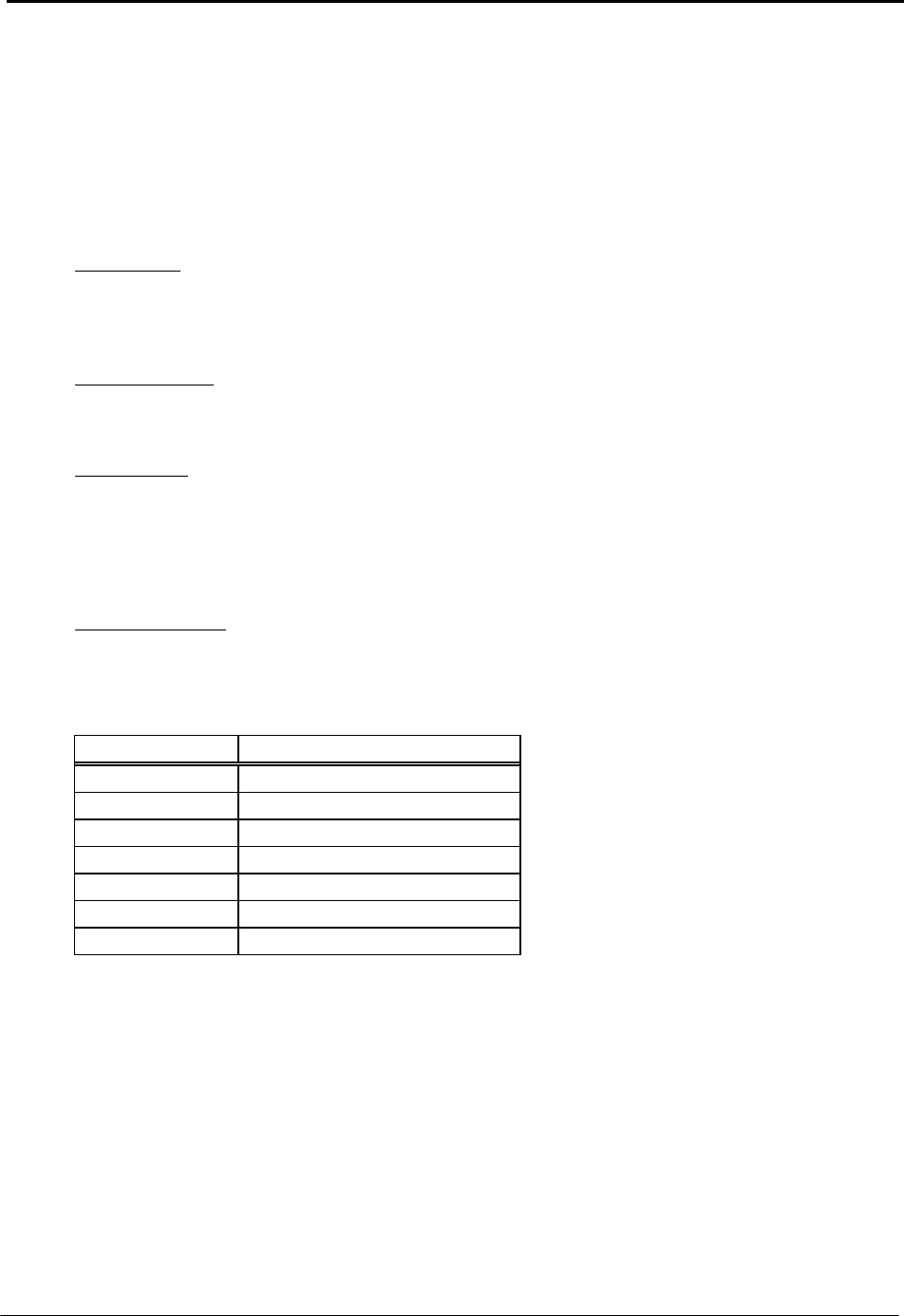
The following are Action commands:
Action Command Completion Cycle
GO Until last instruction is complete
Step Resolution Until previous action complete
Constant Speed Until previous ramp is complete
Find Home Until home is found
Relative Move Until full index is complete
+Step Index Until full index is complete
- Step Index Until full index is comp lete
During the completion cycle (except for “GO”), any non-action command such as “Read Position” may be
executed.
The controller has the capability to “queue up” another action command during the completion cycle
resulting from a preceding action command. The execution and result cycle of this “Pending” command is
delayed until the completion phase is complete. This interval is called the PENDING PERIOD. During this
PENDING PERIOD, the only input accepted is the one character interrupt (abort) command, limit switches,
soft stop input and hard stop (ESCape).
External indication of PENDING PERIOD end, execution and result cycle of the pending instruction is the
carriage RETURN or Line Feed in the party line mode. The GO command is regarded as a command that has
a continuous pending (Instructions Queued) period.