


















ADVANCED MICRO SYSTEMS, INC. ADDENDUM
62
A current sense circuit is used to switch off the current when it reaches the set value; hence the motor
power is regulated. These “chopper“ circuits operate at speeds above 20khz, well above hearing limits.
The following is an abstract from “Control of Stepping Motors, a Tutorial” (linked from
www.stepcontrol.com) by Douglas W. Jones, University of Iowa Department of Computer Science.
http://www.cs.uiowa.edu/~jones/step/index.html.
“Small stepping motors, such as those used for head positioning on floppy disk drives, are usually driven at
a low DC voltage, and the current through the motor windings is usually limited by the internal resistance of
the winding. High torque motors, on the other hand, are frequently built with very low resistance windings;
when driven by any reasonable supply voltage, these motors typically require external current limiting
circuitry.”
“There is good reason to run a stepping motor at a supply voltage above that needed to push the maximum
rated current through the motor windings. Running a motor at higher voltages leads to a faster rise in the
current through the windings when they are turned on, and this, in turn, leads to a higher cutoff speed for
the motor and higher torques at speeds above the cutoff.”
“Microstepping, where the control system positions the motor rotor between half steps, also requires
external current limiting circuitry. For example, to position the rotor 1/4 of the way from one step to another,
it might be necessary to run one motor winding at full current while the other is run at approximately 1/3 of
that current.”
Motor Choice
The discussion here relates to bipolar chopper motors. Internally, standard motors have 4 windings,
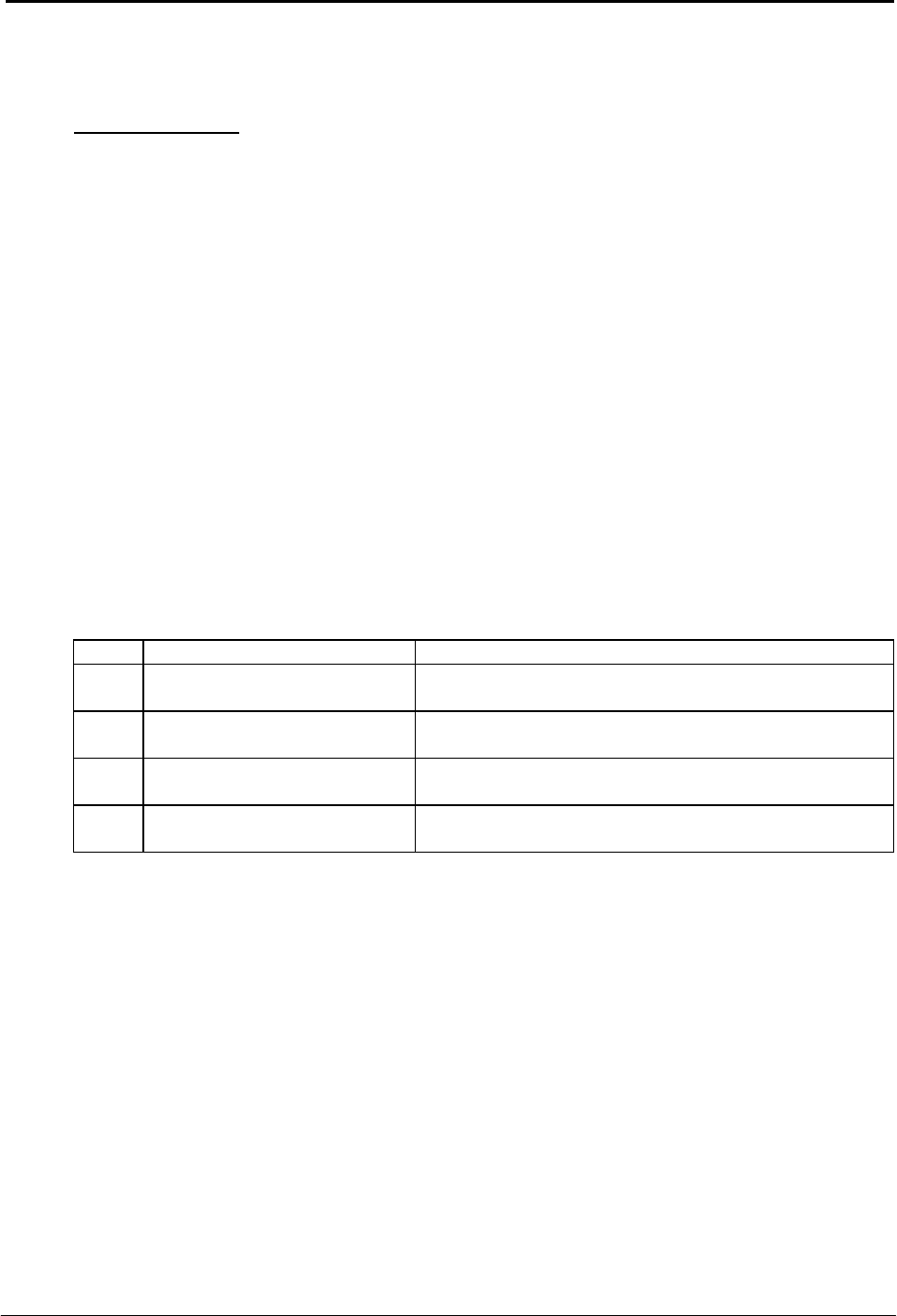
resulting in a total of 8 wire leads. Motor manufacturers supply various configurations:
Leads Application Connection Comment
8 Bipolar (series or parallel),
unipolar
All 8 leads are available. External interconnect can be
cumbersome and untidy.
6 Unipolar or bipolar series Can be used with 50% copper reduced torque but increased
speed possible.
4 Bipolar series or bipolar parallel Series: higher torque but reduced speed capability.
Parallel: higher speed with lowered torque.
5 Unipolar only Not suitable for bipolar drives. See AMS model CCB-25 with
programmable phase sequencing.
Determining the Current Value
Question: What is the right current value?
Answer: The minimum value to operate reliably.
As the step motor current is reduced below the rated current, the torque output is reduced and eventually
the motor will stall. The ideal current setting minimizes heating of motor and electronics, increases reliability,
and reduces power supply requirements. Motors run more quietly and resonance effects can be reduced.
One drawback from low current operation is that some microstep size linearity may be reduced, but full or
half step accuracy is not adversely affected.