


















ADVANCED MICRO SYSTEMS, INC. ADDENDUM
64
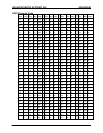
C: Adapting Available 6 Wire Motors
A 6-wire motor is equivalent to the 4-wire series motor.
In practice the two coil ends are connected, while no connection is made
to the center tap.
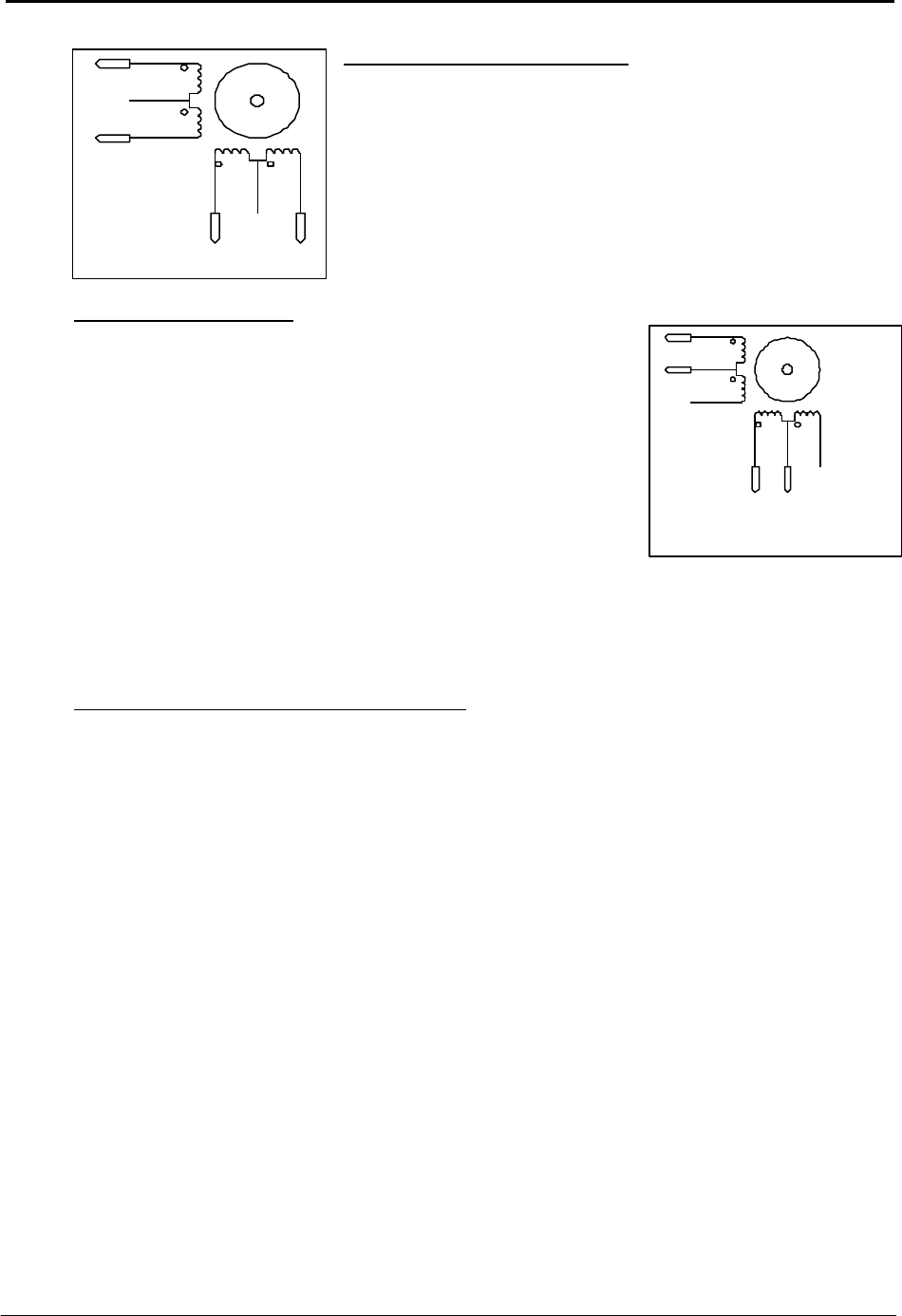
Half Copper or 50% Winding
The maximum speed can be increased by using ½ the coil. To do this,
connect the driver between the center tap and one end of the winding.
The tradeoff is a loss of torque. The RMS current is the manufacturer’s
unipolar amperage rating with the same wattage per phase.
Often a 6-wire design is being upgraded or the size, features, availability
or cost dictate the 6-wire motor. Some characteristics can make the motor
impossible to use. Many motors are rated at voltages in excess of 5 volts.
This means that 10 volts is necessary in the series (100% copper)
configuration.
Aside from having excessive inductance, proper chopper operation dictates operation from voltage sources
much higher than the motor rating. The minimum recommended value for VMM (DC supply) is 2 times the
winding rating (the higher the better, until excessive heating occurs or insulation breakdown).
The Empirical Method for Fine Tuning Your System
The “empirical” method is the best approach for “fine-tuning” the system and can/should be used for all
AMS products. When the best values are determined they can be used in future production, providing
tolerances are sufficiently close.
In this sequence index commands must be executed at the actual “worst case” operating speeds and
conditions.
1. Gradually reduce the current until operation becomes erratic or undesirable.
2. Increase the current gradually until reliable operation is obtained. Then increase the current
equally by 10 to 20%.
In any of these adjustments, monitor motor temperature and insure that excessive heating does not occur.
Larger motors require more time for temperature to stabilize. When a low hold current and short run cycle is
used, heating effects are reduced.
*Optimum amperage is the lowest current where the application indexing is reliable. Sometimes higher
currents (still below the motor ratings) will decrease reliability.
1B
1A
2A
2
B
6 Wire Motor
PIN 1
PIN 2
PIN 4
PIN 5
6 Wire, Half Copper