



















2-4
MDriveAC Plus Microstepping Hardware - Revision R121707
Relevant to Firmware Version 3.0.02
Isolated Logic Input Characteristics
Enable Input
This input can be used to enable or disable the driver output circuitry. Leaving the enable switch open (Logic
HIGH, Disconnected) for sinking or sourcing configuration, the driver outputs will be enabled and the step clock
pulses will cause the motor to advance. When this input switch is closed (Logic LOW) in both sinking and sourc-
ing configurations, the driver output circuitry will be disabled. Please note that the internal sine/cosine position
generator will continue to increment or decrement as long as step clock pluses are being received by the MDriveAC
Plus Microstepping.
Clock Inputs
The MDriveAC Plus Microstepping features the ability to configure the clock inputs based upon how the user will
desire to control the drive. By default the unit is configured for the Step/Direction function.
Step Clock
The step clock input is where the motion clock from your
control circuitry will be connected. The motor will advance
one microstep in the plus or minus direction (based upon
the state of the direction input) on the rising edge of each
clock pulse. The size of this increment or decrement will
depend on the microstep resolution setting.
Direction
The direction input controls the CW/CCW direction
of the motor. The input may be configured as sinking or
sourcing based upon the state of the Optocoupler Refer-
ence. The CW/CCW rotation, based upon the state of the
input may be set using the IMS Motor Interface software
included with the MDriveAC Plus Microstepping.
Quadrature
The Quadrature clock function would typically be used
for following applications where the MDriveAC Plus
Microstepping would be slaved to an MDriveAC Plus
MicroDrive Motion Control (or other controller) in an
electronic gearing application.
Up/Down
The Up/Down clock would typically be used in a dual-
clock direction control application.
Input Timing
The direction input and the microstep resolution inputs
are internally synchronized to the positive going edge of
the step clock input. When a step clock pulse goes HIGH,
the state of the direction input and microstep resolution
settings are latched. Any changes made to the direction
and/or microstep resolution will occur on the rising edge of
the step clock pulse following this change. Run and Hold
Current changes are updated immediately. The following figure and table list the timing specifications.
Input Filtering
The clock inputs may also be filtered using the Clock IOF pull down of the IMS SPI Motor Interface. The
filter range is from 50 nS (10 MHz) to 12.9 µSec. (38.8 kHz).
The configuration parameters for the input filtering is covered in detail in Section 2.4: Configuring the
MDriveAC Plus Microstepping.
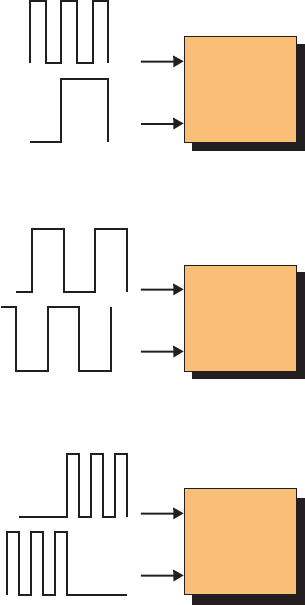
Step Clock
Direction
Channel A
Channel B
CW
CCW
Step/Direction Function
Quadrature Function
Up/Down Function
Figure 2.1.2: Input Clock Functions