



















Outline
1
1-2
2. Mechanism
The mechanism of communication is explained in this section to provide an understand-
ing of how the robot controller and PLC operate via the CC-Link system.
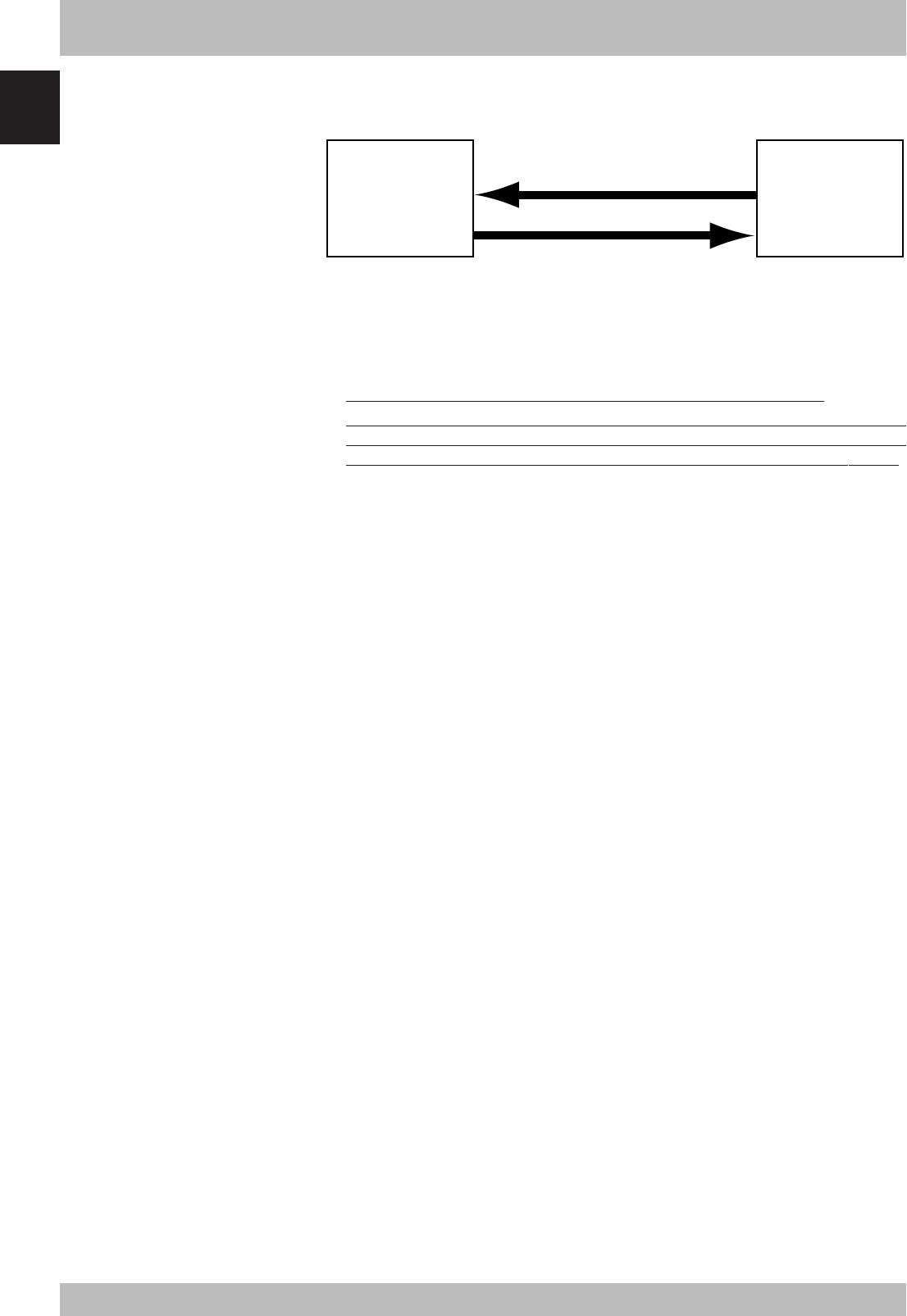
q
w
ON/OFF information
Master station
PLC
Robot
controller
q The robot controller’s ON/OFF information is sent to the master station PLC via the
network (CC-Link system cable).
w The master station PLC’s ON/OFF information is set to the robot controller via the
network (CC-Link system cable).
* The robot controller monitors the ON/OFF information at a 10ms cycle.
* The ON/OFF information consists of 16 points each of dedicated I/O points, 96 points
each of general-purpose I/O points as bit information, and two words each of dedi-
cated I/O words, 14 words each of general-purpose I/O words as word information.
If the following is executed with the robot program in the robot controller, the bit infor-
mation will be sent to the master station PLC via the CC-Link system by q.
SO (20) = 1
Conversely, if the following is executed with the robot program, the bit information re-
ceived from the master station PLC via the CC-Link system will be monitored by w, and
will wait for the ON information.
WAIT SI (20) = 1
If the following is executed with the robot program in the robot controller, the word
information will be sent to the master station PLC via the CC-Link system by q.
SOW (2) = 256
Conversely, if the following is executed with the robot program, the word information
received from the master station PLC via the CC-Link system will be substituted in inte-
ger variable A% by w.
A% = SIW (3)