



















5-14
Specifications
5
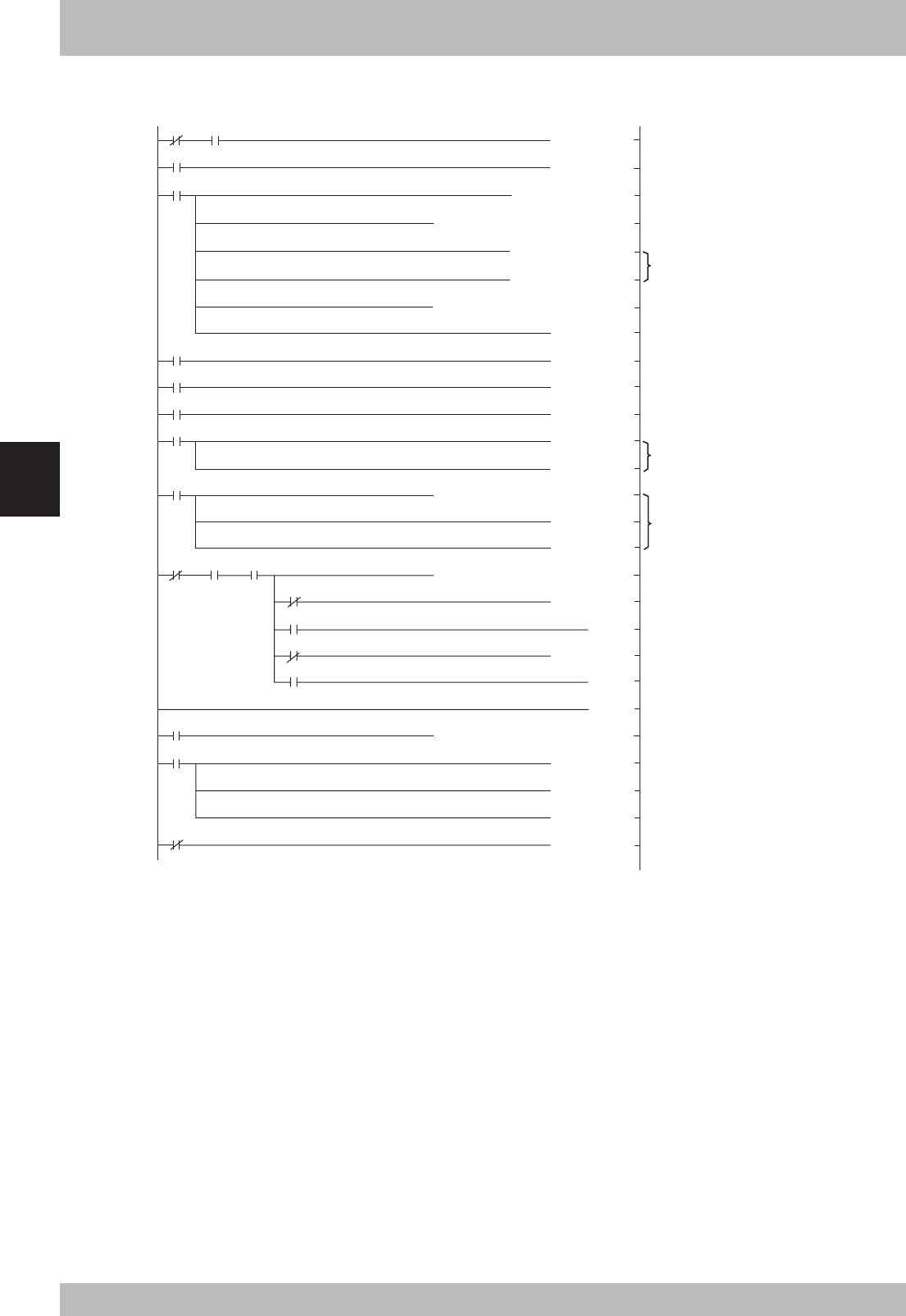
4. Sample program
[PLC program]
0
5
7
42
44
46
48
51
63
91
92
103
107
P10
X0
M0
M1
M9038
M0
M2
X6
X7
X0 X0F X1
M4
M4
M8
M8
M9036
X178
X178
X0F
[
PLS M0
]
[
SET M1
]
[
RST M1
]
[
SET Y0
]
[
SET M2
]
[
SET Y6
]
[
RST Y6
]
[
RST M2
]
[
RST Y6
]
[
RST M2
]
[
CALL P10
]
[
CALL P20
]
[
SET Y100
]
[
SET Y109
]
[
SET Y178
]
[
RST Y178
]
(
Y20
)
(
Y21
)
[
FEND
]
[
MOV K2 D0
]
[
MOV H1401 D1
]
[
MOV H1405 D2
]
[
TO H0 H1 D0 K1
]
[
T0 H0 H20 D1 K2
]
[
FROM H0 H668 D10 K1
]
[
FROM H0 H680 K4M4 K16
]
[
FROM H0 H0E0 K4X100 K8
]
No. of connected modules
Station information
Refresh instruction
Data link start normal completion
Data link start error completion
Read each data link status (SW0080)
Station No. 1 normal
Station No. 1 error
Station No. 2 normal
Station No. 2 error
Read station No. 1 remote input
Set emergency stop input ON
Set interlock input ON
Set initial data process compete flag ON
Set initial data process complete flag OFF