



















3-6
Communication
3
4. Direct connection by emulated serialization on parallel DIO
1. Direct connection from SI n ( ) to DO n ( )
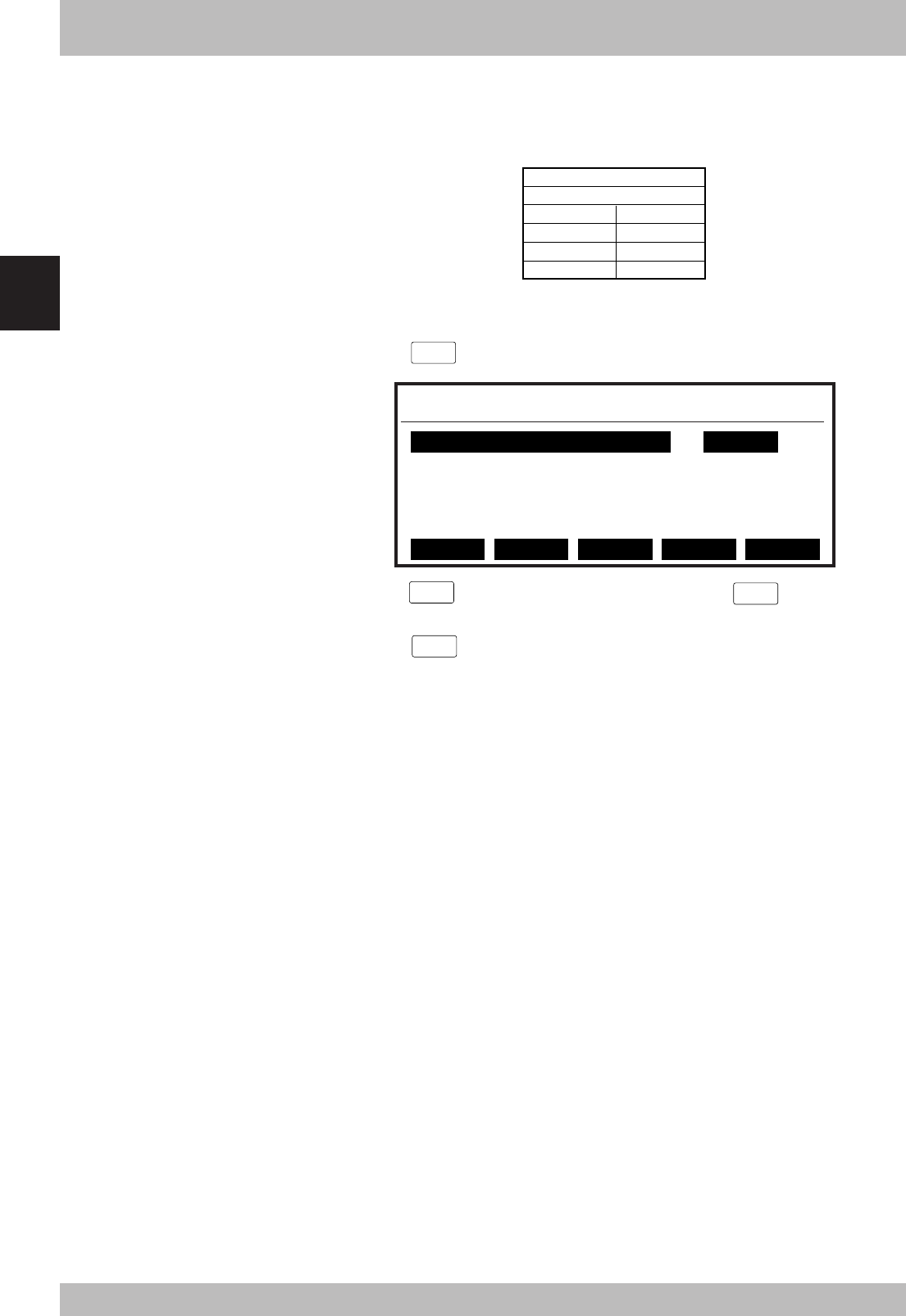
Serial port input can be directly connected to parallel port output. The relation of the
parallel port and serial port that can be connected is as follows.
Output device such as sensor
DO port
SI port
←
DO2() SI2()
DO3() SI3()
DO4() SI4()
DO5() SI5()
[Operation]
1. Select an SI port (from items 1 to 4) in the “SYSTEM > OPTION > SIO” mode.
2. Press the
F 1
(EDIT) key.
SYSTEM>OPTION>SIO V8.01
2.Direct SI3() -> DO3() NO
3.Direct SI4() -> DO4() NO
4.Direct SI5() -> DO5() NO
5.Direct SO2() <- DI2() NO
NO
1.Direct SI2() -> DO2() NO
SET
3. Press the
F 1
(SET) key to enable the connection or the
F 2
(NO) key to cancel
the setting.
4. Press the
ESC
key to quit setting or select another SI port with the cursor keys to
continue setting.
n
NOTE
When the port specified by SIO is
identical with the port used by the
program, the output results might be
inaccurate.