



















3-5
3
Communication
4.
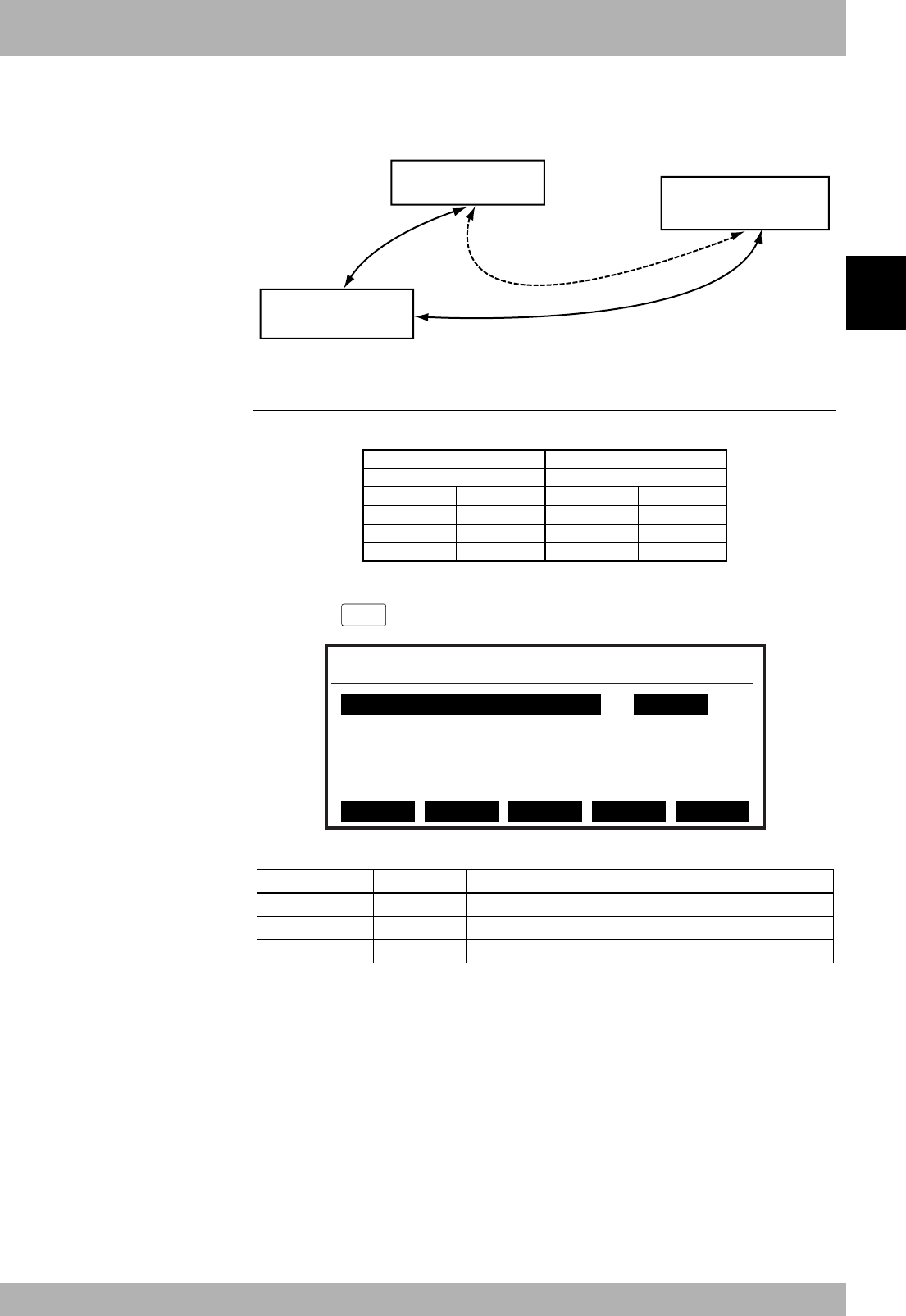
Direct connection by emulated serialization on parallel DIO
The master station PLC can exchange bit information data with the parallel port on the
robot controller’s parallel I/O unit regardless of the robot program. By using this func-
tion, I/O devices such as a sensor or relay can be used like a device connected to CC-Link.
Master station PLC
Remote device station
robot controller
I/O device
Sensor, relay, etc.
Parallel I/O connection
CC-Link
connection
4.1 Emulated serialization setting on parallel DIO
The relation of the parallel port and serial port that can be connected is shown below.
Input device such as sensor
Output device such as valve
DI port
SO port DO port
SI port
→←
DI2() SO2() DO2() SI2()
DI3() SO3() DO3() SI3()
DI4() SO4() DO4() SI4()
DI5() SO5() DO5() SI5()
[Operation]
1. Press the
F 3
(SIO) key in “SYSTEM > OPTION” mode.
SYSTEM>OPTION>SIO V8.01
2.Direct SI3() -> DO3() NO
3.Direct SI4() -> DO4() NO
4.Direct SI5() -> DO5() NO
5.Direct SO2() <- DI2() NO
EDIT JUMP
1.Direct SI2() -> DO2() NO
Valid keys and submenu functions in this mode are as follows.
Valid keys
Cursor (↑/↓) keys
F1
F2
Selects SIO parameters.
Sets SIO parameters.
Jumps to specified SIO parameter.
Menu
EDIT
JUMP
Function
n
NOTE
When the port specified by SIO is
identical with the port used by the
program, the output results might be
inaccurate.
n
NOTE
When the directly connected and set
output port is used with the program,
the bit information may not become the
intended value. Do not use the directly
connected and set output port with the
program.