



















5-1
5
Specifications
1. Profile
YAMAHA robot controller (4-station occupying)
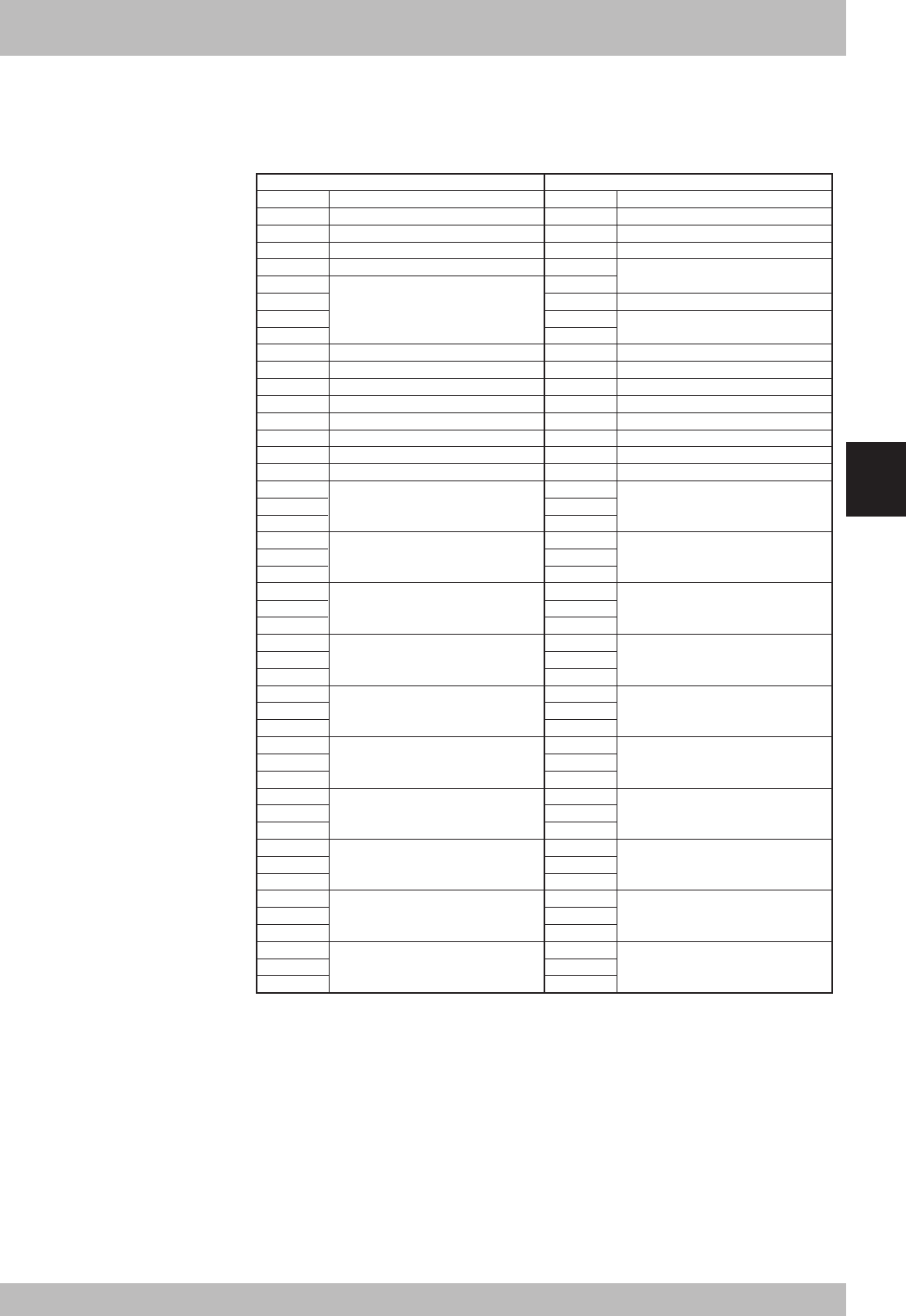
Remote input/output
SO (00):
Emergency stop input status output
SO (01): CPU_OK status output
SO (02): Servo ON status output
SO (03): Alarm status output
System area [for future expansion]
SO (10): AUTO mode status output
SO (11):
Origin return complete status output
SO (12):
Sequence program execution status output
SO (13):
Robot program execution status output
SO (14): Program reset status output
System area [for future expansion]
SO (16):
IO command execution judgment output
SO (17):
Output during IO command execution
SO(20) to SO(27):
General-purpose output
SO(30) to SO(37):
General-purpose output
SO(40) to SO(47):
General-purpose output
SO(50) to SO(57):
General-purpose output
SO(60) to SO(67):
General-purpose output
SO(70) to SO(77):
General-purpose output
SO(100) to SO(107):
General-purpose output
SO(110) to SO(117):
General-purpose output
SO(120) to SO(127):
General-purpose output
SO(130) to SO(137):
General-purpose output
RXn0
RXn1
RXn2
RXn3
RXn4
RXn5
RXn6
RXn7
RXn8
RXn9
RXnA
RXnB
RXnC
RXnD
RXnE
RXnF
RX(n+1)0
to
RX(n+1)7
RX(n+1)8
to
RX(n+1)F
RX(n+2)0
to
RX(n+2)7
RX(n+2)8
to
RX(n+2)F
RX(n+3)0
to
RX(n+3)7
RX(n+3)8
to
RX(n+3)F
RX(n+4)0
to
RX(n+4)7
RX(n+4)8
to
RX(n+4)F
RX(n+5)0
to
RX(n+5)7
RX(n+5)8
to
RX(n+5)F
SI (00): Emergency stop input
SI (01): Servo ON input
SI (02): Service mode input
System area [for future expansion]
SI (05):
IO command execution trigger input
System area [for future expansion]
SI (10): Sequence control input
SI (11): Interlock input
SI (12): Robot program start input
SI (13): AUTO mode input
System area [for future expansion]
SI (15): Program reset input
SI (16): MANUAL mode input
SI (17): Absolute reset input
SI(20) to SI(27): General-purpose input
SI(30) to SI(37): General-purpose input
SI(40) to SI(47): General-purpose input
SI(50) to SI(57): General-purpose input
SI(60) to SI(67): General-purpose input
SI(70) to SI(77): General-purpose input
SI(100) to SI(107):
General-purpose input
SI(110) to SI(117):
General-purpose input
SI(120) to SI(127):
General-purpose input
SI(130) to SI(137):
General-purpose input
RYn0
RYn1
RYn2
RYn3
RYn4
RYn5
RYn6
RYn7
RYn8
RYn9
RYnA
RYnB
RYnC
RYnD
RYnE
RYnF
RY(n+1)0
to
RY(n+1)7
RY(n+1)8
to
RY(n+1)F
RY(n+2)0
to
RY(n+2)7
RY(n+2)8
to
RY(n+2)F
RY(n+3)0
to
RY(n+3)7
RY(n+3)8
to
RY(n+3)F
RY(n+4)0
to
RY(n+4)7
RY(n+4)8
to
RY(n+4)F
RY(n+5)0
to
RY(n+5)7
RY(n+5)8
to
RY(n+5)F
Remote → Master Master → Remote
Device No. Signal name Device No. Signal name
n: Address assi
g
ned to master module with station No. settin
g