



















© 2005 - 2011 TOSHIBA TEC CORPORATION All rights reserved MR-3018/3020/3021/3022
DESCRIPTION OF OPERATIONS
3 - 13
3
YES
YES
NO
YES
NO
YES
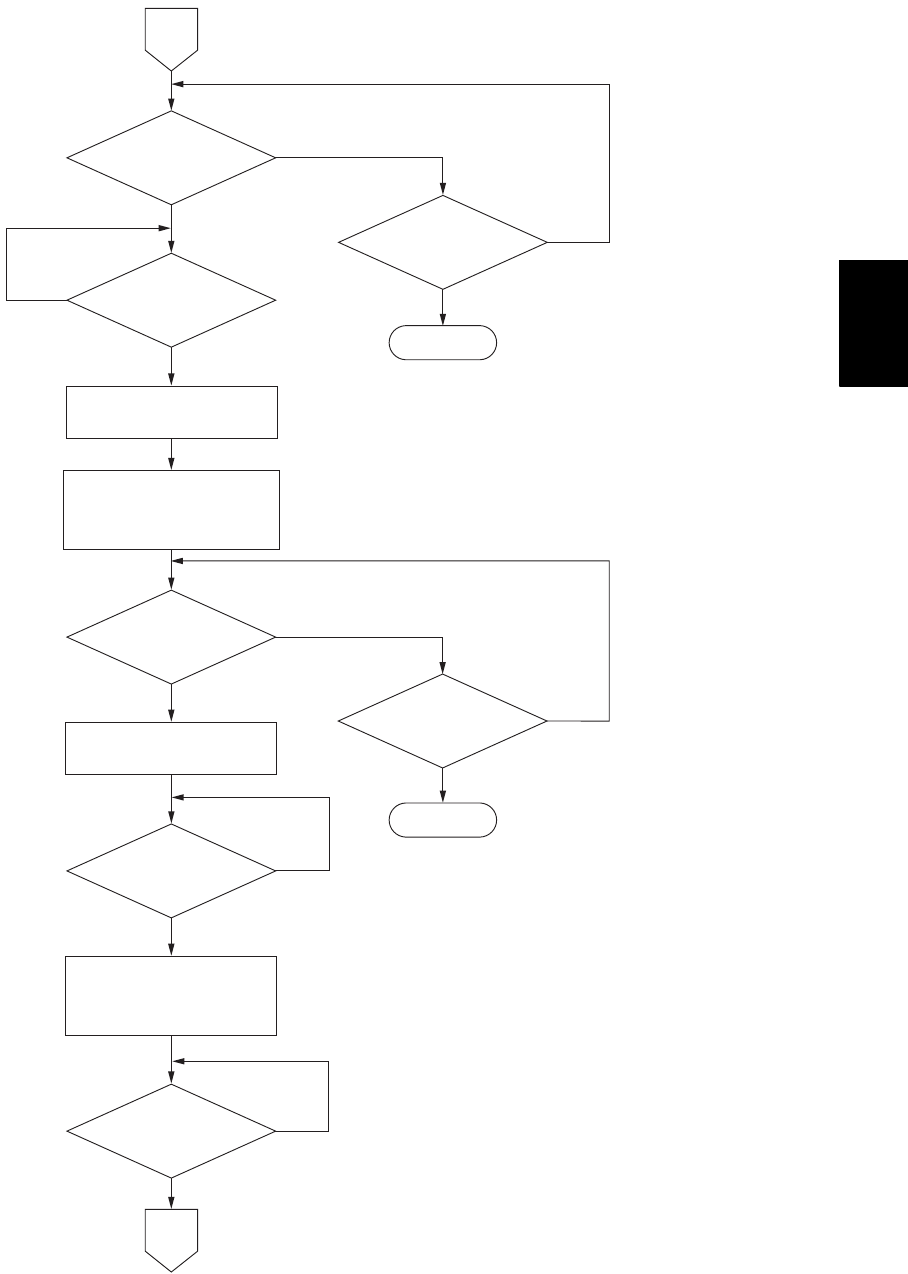
Transport request
signal received?
NO
YES
YES
NO
NO
YES
NO
NO
Original intermediate
transport sensor ON?
Exit/reverse and read motor
stop after transporting for
a certain amount of distance.
Original exit/reverse motor
and read motor stop.
F
G
After a certain period of time,
original exit/reverse motor reverses,
read motor starts, reverse roller
aligns original, and then system reboots.
Read motor and
exit/reverse motor rotate
at requested speed.
Transport for
a certain amount of
distance completed?
Jam
A certain period
of time passed?
Original exit/reverse
sensor OFF?
Jam
A certain period
of time passed?
Transport for
a certain amount of
distance completed?