SJ100 Inverter
Operations
and Monitoring
4–37
If the inverter drives a motor/load with a small inertia, the motor may exhibit “hunting”
during running. If this occurs, take the following corrective steps:
1. Adjust the stabilization constant H_06/H206.
2. Decrease the carrier frequency B_83, but not below 2.1 kHz.
3. Set the Automatic Voltage Regulation (AVR) function A_81 to the OFF setting
(disabled = 01).
If the desired characteristic cannot be obtained in sensorless vector controlled operation
with standard (factory default) or auto-tuning data, adjust the motor constant(s)
according to the observed symptoms shown below.
Note 1: If the inverter is using sensorless vector control and the motor is more than
one frame size smaller than the maximum applicable motor, then the motor
characteristic values may not be satisfactory.
Note 2: No sensorless vector control operation is possible if two or more motors are
connected (parallel operation).
Note 3: When the auto-tuning function is executed in the state that the DC braking is
set, the motor constants will not be accurately set. Therefore, disable DC
braking and then start the auto-tuning procedure again.
Note 4: When accelerating or speeding up is not to be performed in the auto-tuning
step for accelerating up to 80% of the base frequency, lower the set value of
manual torque boost.
Note 5: Be sure the motor is stopped before you carry out an auto-tuning procedure.
Auto-tuning data that is derived while the motor is still running may not be
correct.
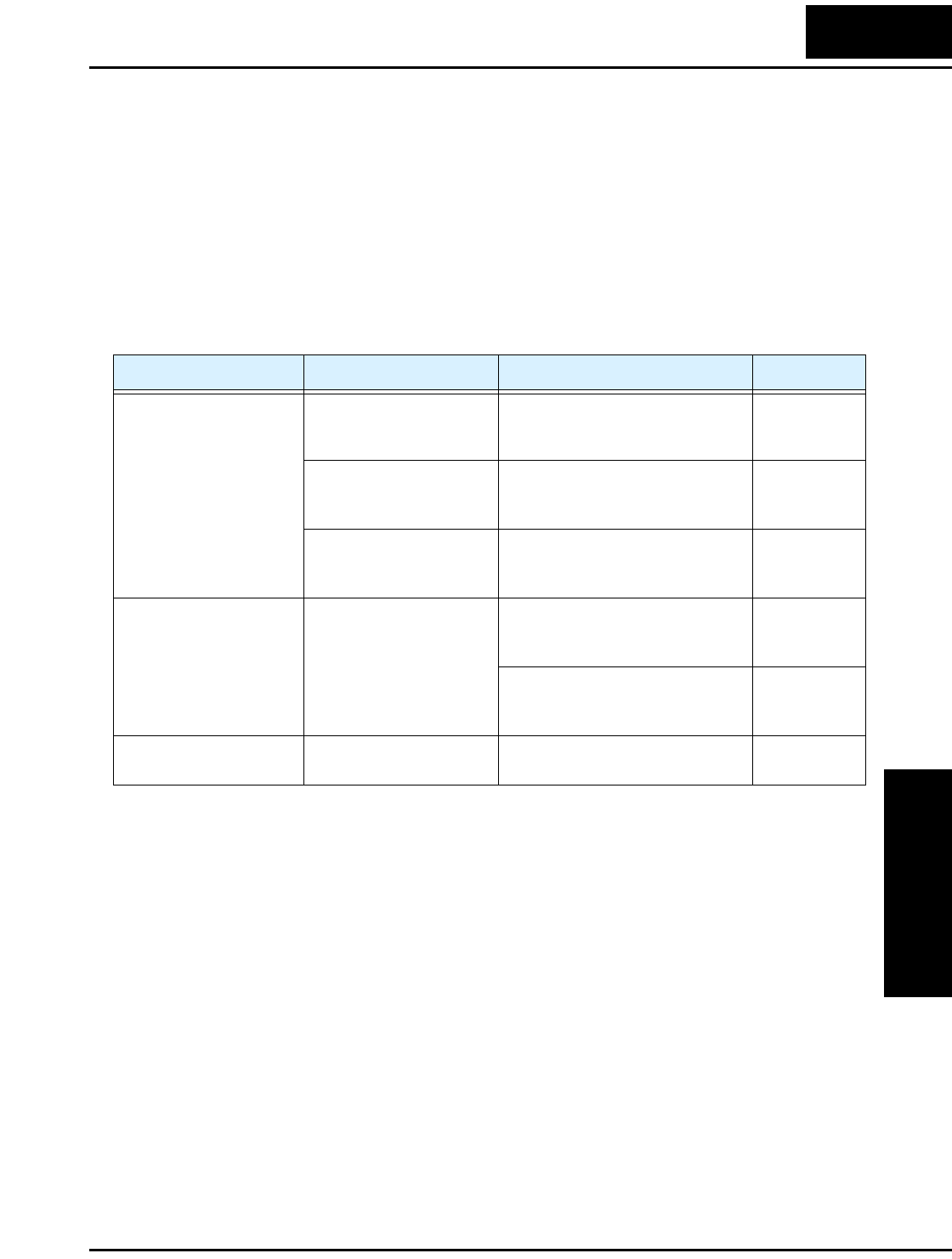
Operation Status Symptom Adjustment Parameter
Powered running
(status with a positive
torque)
When low frequency (a
few Hz) torque is insuffi-
cient
Increase the motor speed constant
R1 step by step, up to 1.2 times
initial value.
H_20 / H_30 /
H220/ H230
When the speed deviation
is negative
Increase the motor constant R2
step by step, up to 1.2 times initial
value.
H_21 / H_31 /
H221 / H231
When the speed deviation
is positive
Decrease the motor constant R2
step by step, down to 0.8 times
initial value.
H_21 / H_31 /
H221 / H231
Regeneration
(status with a negative
torque)
When low frequency (a
few Hz) torque is insuffi-
cient
Increase the motor speed constant
R1 step by step, up to 1.2 times
initial value.
H_20 / H_30 /
H220/ H230
Increase the motor constant Io
step by step, up to 1.2 times initial
value.
H_23 / H_33 /
H223 / H233
Driving or regenerating Unstable rotation Decrease the carrier frequency set
value.
B_83























































































































































































































